偙偺儁乕僕偵偮偄偰
嶌幰偺揹巕岺嶌傪徯夘偡傞丅
僴儞僨傿丂僆僔儘僗僐乕僾
庤寉偵巊偊傞僴儞僨傿僞僀僾偺僆僔儘僗僐乕僾傪嶌傞偙偲偵偟偨丅
巹偺僆僔儘僗僐乕僾偺梡搑偼丄傎偲傫偳偑儅僀僐儞偺弌椡怣崋偺妋擣側偺偱丄偦傟傎偳暘夝擻偼昁梫偲偟側偄丅
偪傚偭偲妋偐傔偨偄偲偒偵丄僥僗僞乕偲摨偠偔傜偄偺庤寉偝偱摦揑側怣崋傪妋擣偡傞摴嬶偑傎偟偄丅
巹偺僆僔儘僗僐乕僾偺梡搑偼丄傎偲傫偳偑儅僀僐儞偺弌椡怣崋偺妋擣側偺偱丄偦傟傎偳暘夝擻偼昁梫偲偟側偄丅
偪傚偭偲妋偐傔偨偄偲偒偵丄僥僗僞乕偲摨偠偔傜偄偺庤寉偝偱摦揑側怣崋傪妋擣偡傞摴嬶偑傎偟偄丅
僾儘僩僞僀僾
擖椡傾儞僾偼侾偮偺僆儁傾儞僾偱峔惉偟偨偺偱丄擖椡僀儞僺乕僟儞僗偼掅傔偵側偭偨偑丄梡搑偑傎偲傫偳僨僕僞儖夞楬側偺偱丄傛偟偲偟偨丅應掕帪偵嬌惈傪偁傑傝堄幆偟偨偔側偐偭偨偺偱丄僨僕僞儖夞楬梡偩偑丄儅僀僫僗懁偺應掕傪僒億乕僩偟偨丅
庤寉偵巊偊傞傪僐儞僙僾僩偵丄揹尮ON偱懄應掕偱偒傞傛偆偵偟偨丅
巇條僒儞僾儕儞僌懍搙 丒丒丒丒嵟戝50kSPS
應掕壜擻揹埑 丒丒丒丒亇6V (亇10V傑偱擖椡傪嫋梕乯
擖椡僠儍僱儖悢 丒丒丒丒4ch
CPU 丒丒丒丒H8S/2128 20MHz
夋柺夝憸搙 丒丒丒丒84x48
揹尮 丒丒丒丒扨係揹抮丂俁杮
亂儅僯儏傾儖亃 儅僯儏傾儖
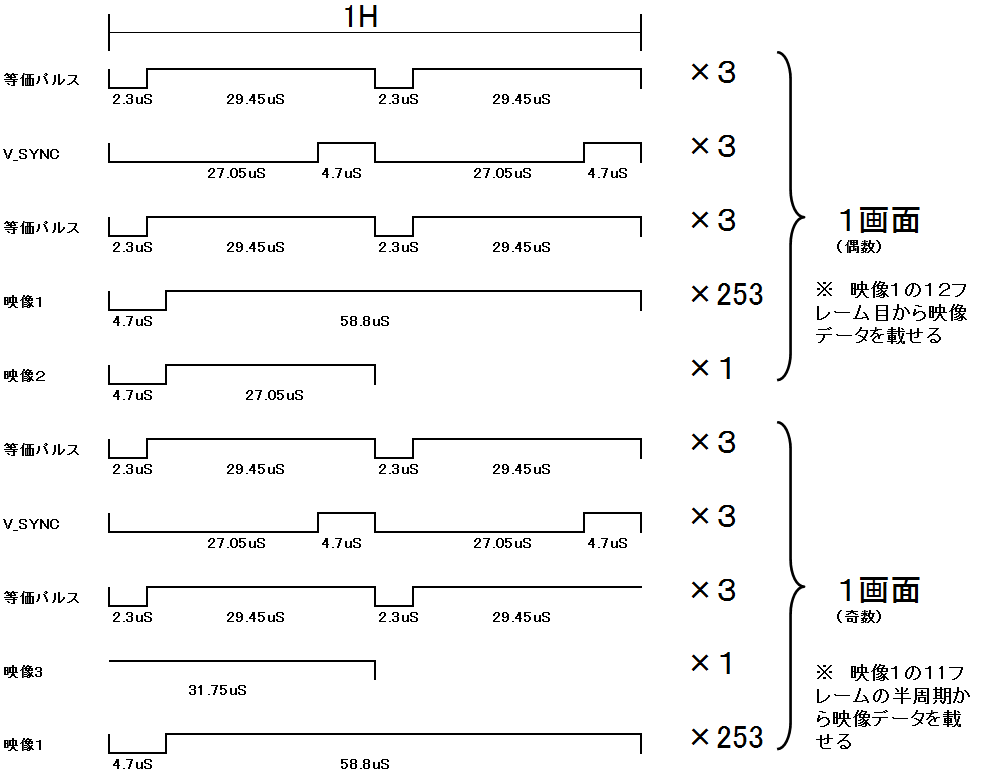
亂摦嶌忬嫷亃
亂儐乕僗働乕僗恾亃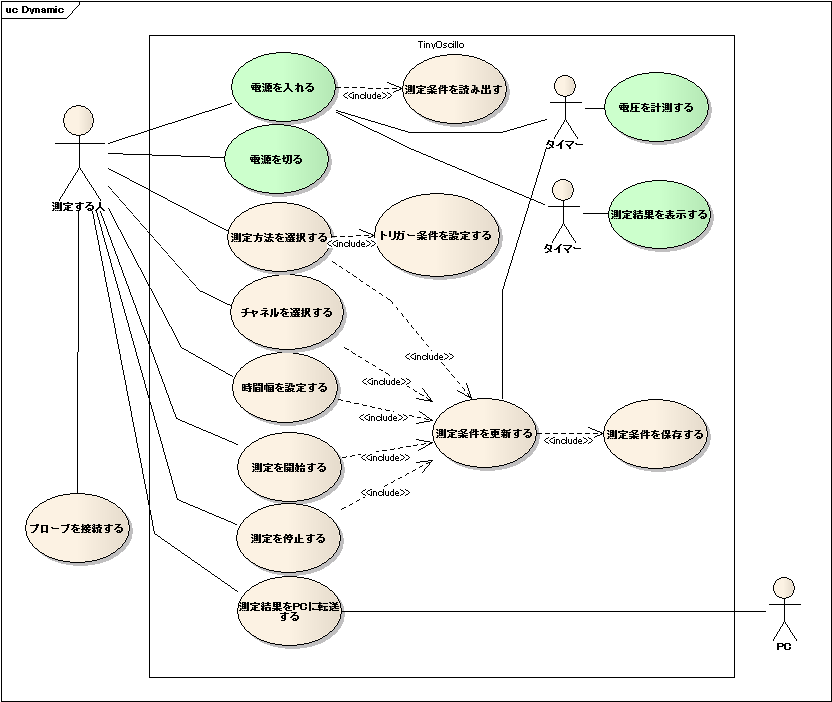
亂夞楬恾亃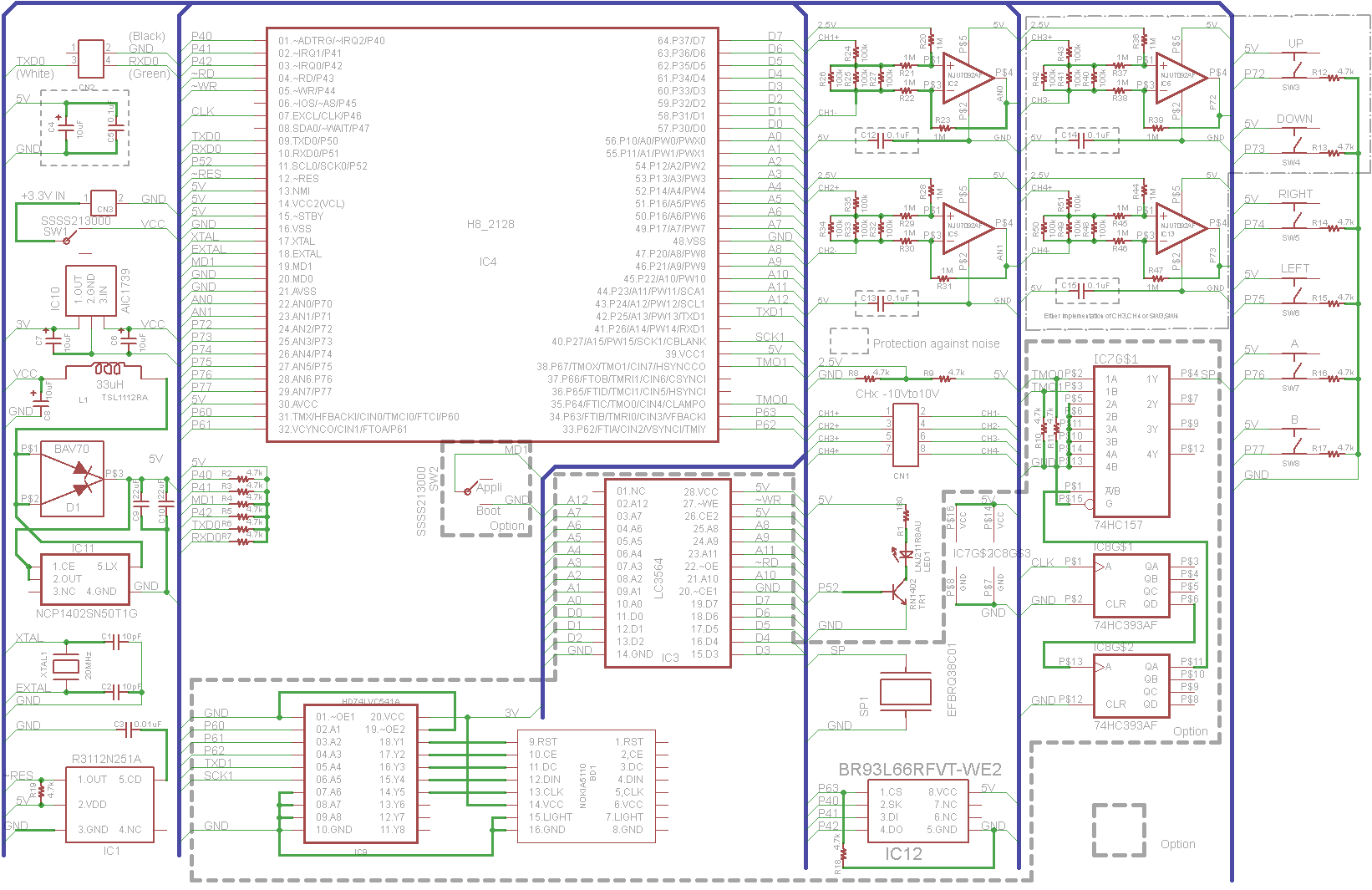
晹昳攝抲
偙偺儁乕僕偺嵟弶偵堏摦
庤寉偵巊偊傞傪僐儞僙僾僩偵丄揹尮ON偱懄應掕偱偒傞傛偆偵偟偨丅
巇條
亂儅僯儏傾儖亃 儅僯儏傾儖
亂摦嶌忬嫷亃
亂儐乕僗働乕僗恾亃
亂夞楬恾亃
晹昳攝抲
價僨僆僎乕儉婡
乽儅僀僐儞傪巊偭偨僎乕儉偲偄偊偽丄價僨僆僎乕儉偩傠偆乿偲偄偆偙偲偱丄
崱夞偼丄價僨僆僎乕儉婡偵僠儍儗儞僕偟偰傒偨丅
NTSC怣崋偺惗惉偲岠壥壒丄僎乕儉恑峴傪H8S/2128儚儞僠僢僾偱幚尰偟偨丅
巇條夋柺昞帵丒丒丒丒224x184僪僢僩 敀崟 NTSC弌椡
僒僂儞僪丒丒丒丒價乕僾 1僠儍儞僱儖
CPU丒丒丒丒H8S/2128 20MHz
揹尮丒丒丒丒扨4 3杮
RAM(撪憼+奜晹)丒丒丒丒12k Byte(4k + 8k)
ROM(撪憼)丒丒丒丒128k Byte
僒僀僘丒丒丒丒82x49x38mm
崱夞偼丄價僨僆僎乕儉婡偵僠儍儗儞僕偟偰傒偨丅
NTSC怣崋偺惗惉偲岠壥壒丄僎乕儉恑峴傪H8S/2128儚儞僠僢僾偱幚尰偟偨丅
巇條
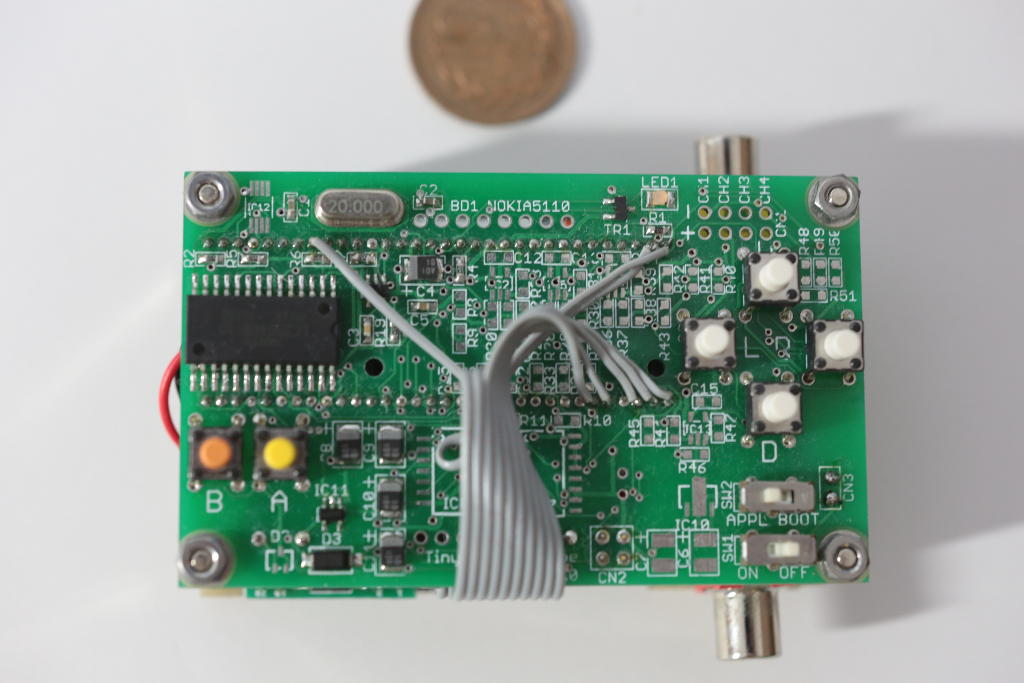
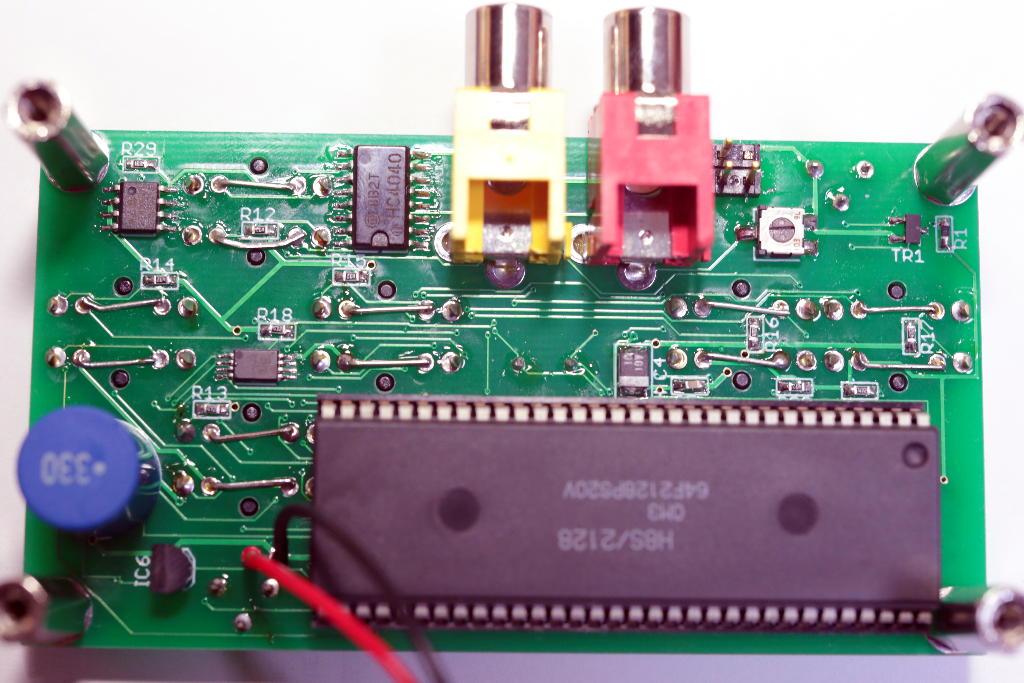
亂枩擻婎斅傪巊偭偰帋嶌亃
亂婎斅傪嶌偭偰幚憰偟偨傕偺亃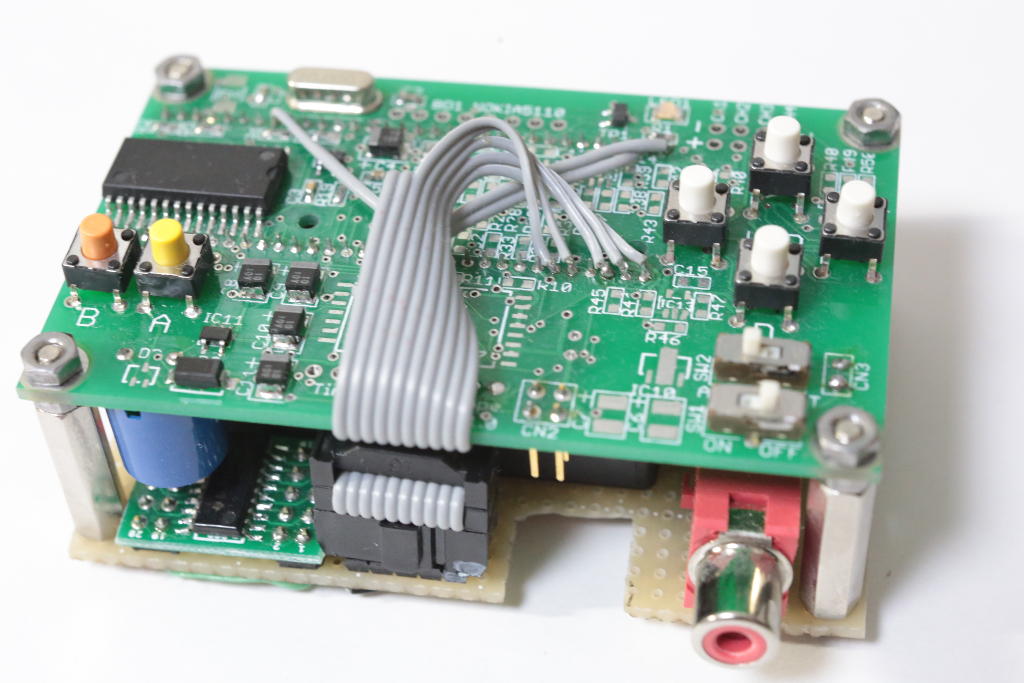

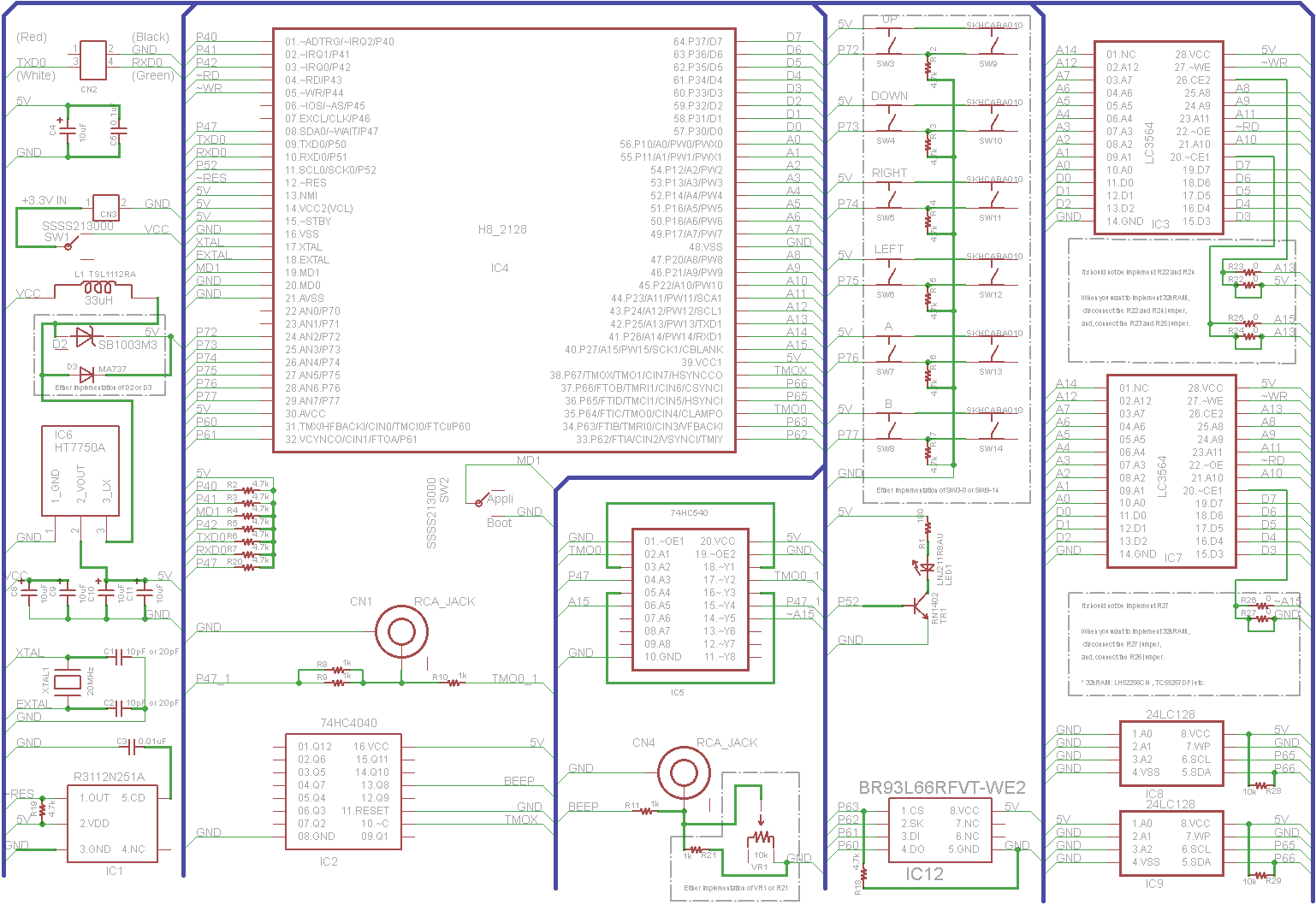
夞楬
NTSC怣崋偵偮偄偰
崱夞偺惢嶌偵偁偨傝NTSC怣崋偵偮偄偰挷傋偨偺偱丄埲壓偵傑偲傔傞丅
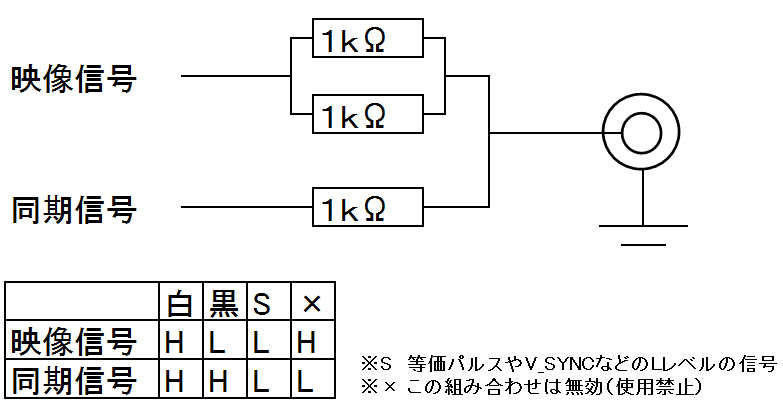
嬼悢偲婏悢偺夋柺偱怣崋偺攇宍偑堎側傞丅
NTSC價僨僆怣崋偼丄壓婰偺夞楬傪梡偄偰弌椡偟偨丅
塮憸怣崋偲摨婜怣崋偼丄H8S/2128偺I/O億乕僩側偳5V弌椡抂巕傪棙梡偡傞丅
嬼悢偲婏悢偺夋柺偱怣崋偺攇宍偑堎側傞丅
NTSC價僨僆怣崋偼丄壓婰偺夞楬傪梡偄偰弌椡偟偨丅
塮憸怣崋偲摨婜怣崋偼丄H8S/2128偺I/O億乕僩側偳5V弌椡抂巕傪棙梡偡傞丅
Space Invaders婡擻捛壛
屻弎偺億乕僞僽儖僎乕儉婡偵僔儕傾儖EEPROM傪捛壛偟丄揹尮傪愗偭偰傕HiScore偑巆傞傛偆偵偟偨丅
僎乕儉偵傕UFO傗婎抧側偳傪捛壛偟偰傒偨丅
僎乕儉偵傕UFO傗婎抧側偳傪捛壛偟偰傒偨丅
夞楬
億乕僞僽儖僎乕儉婡
1980擭戙偺儅僀僐儞偵偼丄悢擔娫偱儈僯僎乕儉側偳偺傾僀僨傾傪幚憰偟偰妝偟傔傞庤寉偝偑偁偭偨丅
崱怳傝曉傞偲丄夋柺昞帵傗壒妝偺昞尰側偳偵惂栺偼懡偐偭偨偑丄媡偵偦偺偙偲偑丄僨僼僅儖儊偟偨傾僀僨傾傪庤寉偵嬶懱壔偱偒傞偲偄偆儊儕僢僩偵側偭偰偄偨傛偆偵巚偊傞丅
崱偺儅僀僐儞傪巊偭偰丄摉帪偺儅僀僐儞傪暅妶偝偣偰傒偨偄丅偲偄偆梸媮偵丄偳偆偣嶌傞側傜丄C++傪巊偄偨偄丅億乕僞僽儖側傕偺偵偟偨偄丅側偳偺巚偄偲丄帪娫偼偐偗傜傟側偄偲偄偆尰幚偲偺懨嫤揰傪扵偭偰丄埲壓偺僗儁僢僋偺億乕僞僽儖僎乕儉婡偲丄偦偺儅僔儞忋偱摦偔僀儞儀乕僟僎乕儉傪嶌傞偙偲偵偟偨丅
巇條夋柺昞帵丒丒丒丒84x48僪僢僩 敀崟
僒僂儞僪丒丒丒丒價乕僾 4僠儍儞僱儖
CPU丒丒丒丒H8S/2238B 12.288MHz
揹尮丒丒丒丒扨4 3杮
RAM(撪憼)丒丒丒丒16k Byte
ROM(撪憼)丒丒丒丒256k Byte
僒僀僘丒丒丒丒70x90x40mm
崱怳傝曉傞偲丄夋柺昞帵傗壒妝偺昞尰側偳偵惂栺偼懡偐偭偨偑丄媡偵偦偺偙偲偑丄僨僼僅儖儊偟偨傾僀僨傾傪庤寉偵嬶懱壔偱偒傞偲偄偆儊儕僢僩偵側偭偰偄偨傛偆偵巚偊傞丅
崱偺儅僀僐儞傪巊偭偰丄摉帪偺儅僀僐儞傪暅妶偝偣偰傒偨偄丅偲偄偆梸媮偵丄偳偆偣嶌傞側傜丄C++傪巊偄偨偄丅億乕僞僽儖側傕偺偵偟偨偄丅側偳偺巚偄偲丄帪娫偼偐偗傜傟側偄偲偄偆尰幚偲偺懨嫤揰傪扵偭偰丄埲壓偺僗儁僢僋偺億乕僞僽儖僎乕儉婡偲丄偦偺儅僔儞忋偱摦偔僀儞儀乕僟僎乕儉傪嶌傞偙偲偵偟偨丅
巇條
夞楬
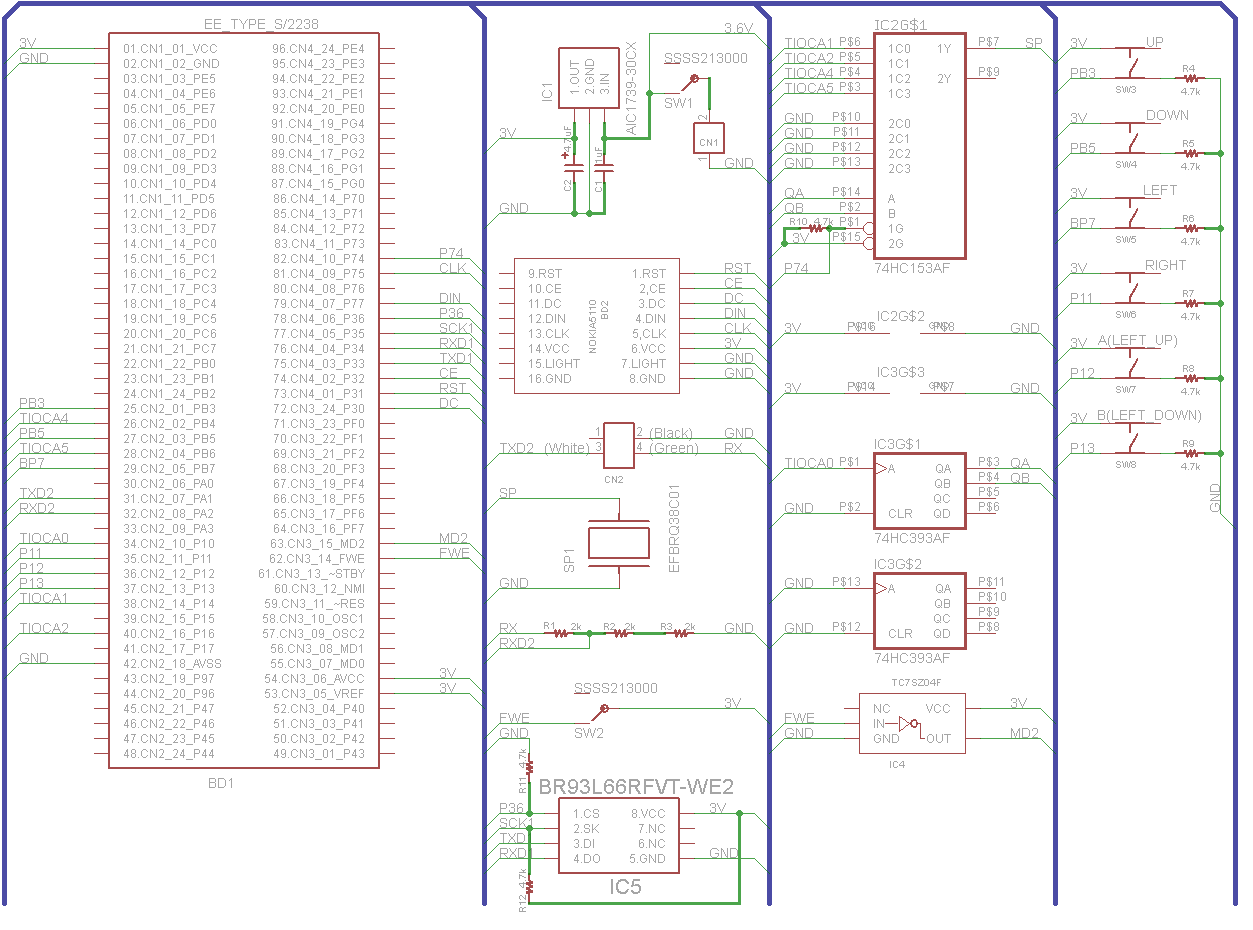
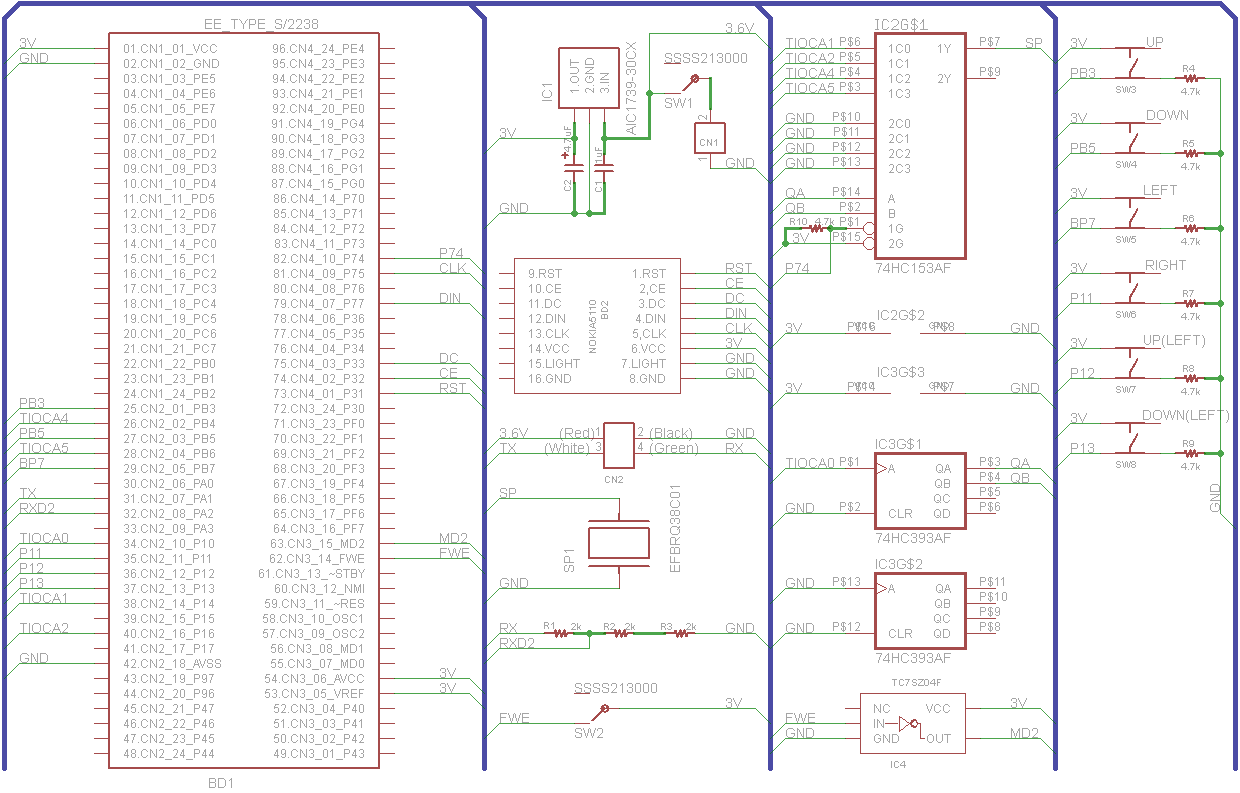
儅僀僐儞偵EE_Type_S/2238傪丄昞帵偼NOKIA5110偺LCD傪巊梡偟偨丅嵟掅偱傕俁壒傪摨帪偵弌偟偨偐偭偨偺偱丄埑揹僽僓乕傪係偮偵帪暘妱偟偰棙梡偱偒傞傛偆丄H8偺PWM弌椡傪僙儗僋僞IC傪夘偟偰埑揹僽僓乕偵愙懕偟偨丅
夞楬恾
僜僼僩僂僄傾晹
僋儔僗恾
傾僾儕働乕僔儑儞僪儊僀儞偺僋儔僗恾偼埲壓偺傛偆偵側偭偨丅
Demo偲Stage偑僞僗僋偩丅儃僞儞偺憖嶌偵偟偨偑偭偰丄僨儌夋柺昞帵帪偵Demo僋儔僗丄僎乕儉僗僞乕僩屻偼Stage僋儔僗偑摦揑偵惗惉偝傟傞丅 僎乕儉奐巒屻偺抦幆偼丄揋娭楢偼Army偲Invader偲Beam丄帺婡娭楢偼Tank偲Missile偵傑偲傔偨丅
Demo偲Stage偑僞僗僋偩丅儃僞儞偺憖嶌偵偟偨偑偭偰丄僨儌夋柺昞帵帪偵Demo僋儔僗丄僎乕儉僗僞乕僩屻偼Stage僋儔僗偑摦揑偵惗惉偝傟傞丅 僎乕儉奐巒屻偺抦幆偼丄揋娭楢偼Army偲Invader偲Beam丄帺婡娭楢偼Tank偲Missile偵傑偲傔偨丅
摦夋
柪楬扵嶕儘儃僢僩
1980擭戙偺儅僀僐儞嶨帍偵儅僀僋儘儅僂僗偺僀儀儞僩偺婰帠偑戝偒偔庢傝忋偘傜傟偰偄偨偺傪妎偊偰偄傞丅
摉帪偼丄崅峑偺婣傝偑偗偵I/O傗儅僀僐儞傪撉傒側偑傜丄偄偮偐偼儅僢僺乕孨乮桳柤側儅僀僋儘儅僂僗偺柤慜乯傒偨偄側儘儃僢僩傪嶌偭偰傒偨偄偲巚偭偨傕偺偩偭偨丅
摉帪偼晹昳傪攦偆偍嬥傕愝寁偡傞僗僉儖傕側偐偭偨偑丄崱側傜嶌傟傞傛偆側婥偑偡傞丅偟偐偟丄帺桼偵側傞帪娫偼彮側偄丅
乽壗偲偐悢擔偱丄柪楬扵嶕儘儃僢僩傪嶌傝偨偄丅乿偲巚偄丄棫懱偱偼側偔暯柺偵昤偄偨柪楬傪扵嶕偡傞儘儃僢僩傪嶌傞偙偲偵寛傔偨丅
摉帪偼丄崅峑偺婣傝偑偗偵I/O傗儅僀僐儞傪撉傒側偑傜丄偄偮偐偼儅僢僺乕孨乮桳柤側儅僀僋儘儅僂僗偺柤慜乯傒偨偄側儘儃僢僩傪嶌偭偰傒偨偄偲巚偭偨傕偺偩偭偨丅
摉帪偼晹昳傪攦偆偍嬥傕愝寁偡傞僗僉儖傕側偐偭偨偑丄崱側傜嶌傟傞傛偆側婥偑偡傞丅偟偐偟丄帺桼偵側傞帪娫偼彮側偄丅
乽壗偲偐悢擔偱丄柪楬扵嶕儘儃僢僩傪嶌傝偨偄丅乿偲巚偄丄棫懱偱偼側偔暯柺偵昤偄偨柪楬傪扵嶕偡傞儘儃僢僩傪嶌傞偙偲偵寛傔偨丅
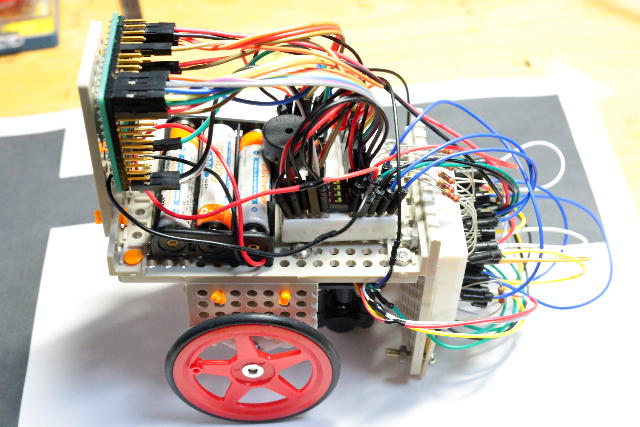
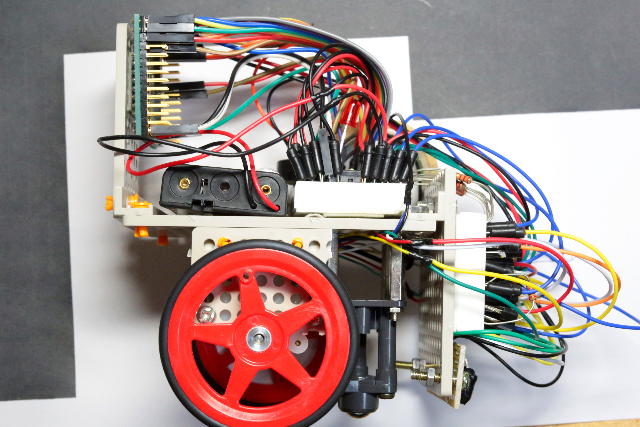
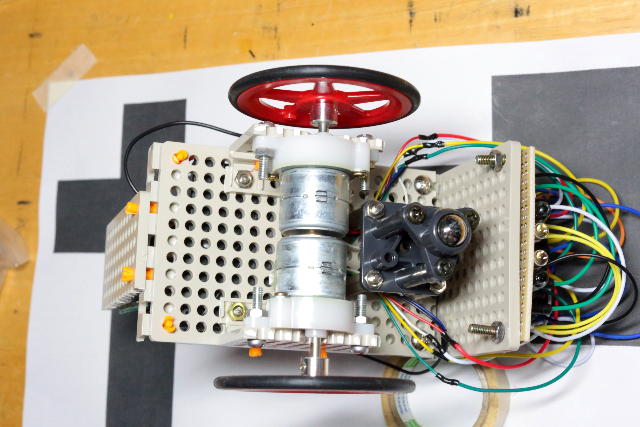
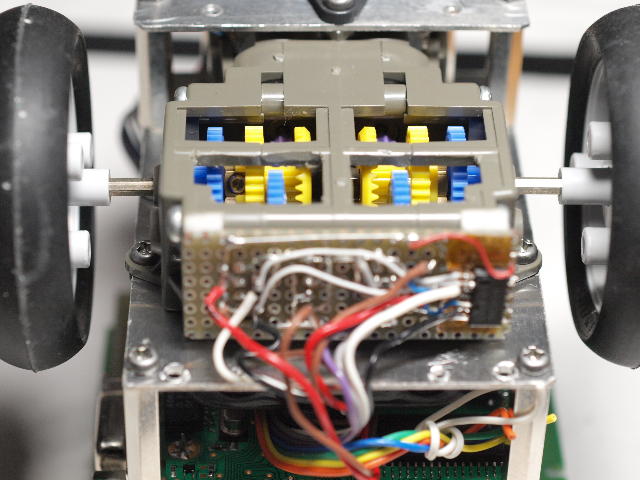
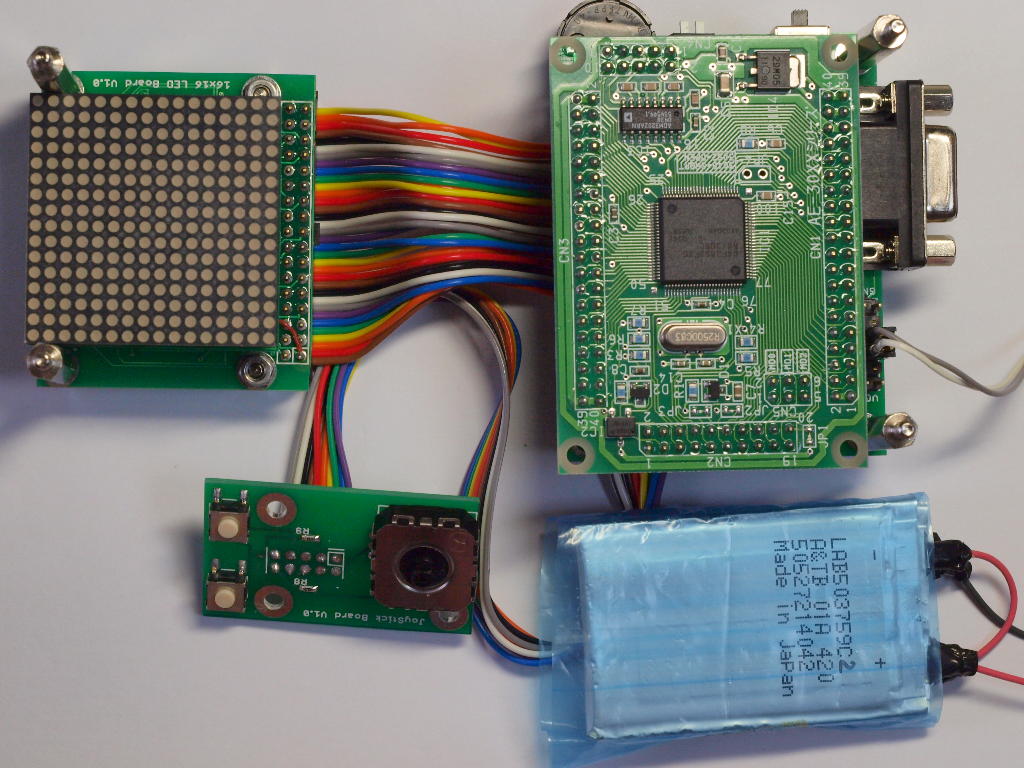
婡峔晹
儐僯僶乕僒儖僾儗乕僩偺暆乮栺俇們倣乯傪偦偺傑傑杮懱偺暆偵嵦梡偟偨丅
塃偺幨恀偺傛偆偵僋儔儞僋忬偵側傞傛偆偵儐僯僶乕僒儖僾儗乕僩傪晅懏偺傾儞僌儖嵽傪巊偭偰屌掕偟偨丅
僗僥僢僺儞僌儌乕僞傪庢傝晅偗傞僾儗乕僩偼丄俇們倣暆偺儐僯僶乕僒儖僾儗乕僩傪敿暘偵愗偭偰俁們倣偢偮偵愗傝弌偟偰巊偭偨丅僗僥僢僺儞僌儌乕僞傪儐僯僶乕僒儖僾儗乕僩偵偹偠偱屌掕偟傛偆偲偡傞偲丄幉偑儐僯僶乕僒儖僾儗乕僩偵偁偨傞偺偱丄偦偺晹暘偼嶰妏偵愗傟栚傪擖傟偰偁偨傜側偄傛偆偵壛岺偟偨丅
儃乕儖僉儍僗僞偼丄37mm偺崅偝偵側傞傛偆慻傒棫偰偰丄係杮偺嬥懏僗儁乕僒傪巊偭偰杮懱偵屌掕偟偨丅 幵椫偼僾乕儕乕傪巊偄丄僗僥僢僺儞僌儌乕僞偺幉乮捈宎3mm乯偵捈愙傾儖儈儃僗偺僱僕傪巊偭偰屌掕偟偨丅
僾乕儕乕偵P-48偺僆乕儕儞僌傪偼傔幵椫偺僑儉偵偟偨丅
庡側晹昳
僗僥僢僺儞僌儌乕僞傪庢傝晅偗傞僾儗乕僩偼丄俇們倣暆偺儐僯僶乕僒儖僾儗乕僩傪敿暘偵愗偭偰俁們倣偢偮偵愗傝弌偟偰巊偭偨丅僗僥僢僺儞僌儌乕僞傪儐僯僶乕僒儖僾儗乕僩偵偹偠偱屌掕偟傛偆偲偡傞偲丄幉偑儐僯僶乕僒儖僾儗乕僩偵偁偨傞偺偱丄偦偺晹暘偼嶰妏偵愗傟栚傪擖傟偰偁偨傜側偄傛偆偵壛岺偟偨丅
儃乕儖僉儍僗僞偼丄37mm偺崅偝偵側傞傛偆慻傒棫偰偰丄係杮偺嬥懏僗儁乕僒傪巊偭偰杮懱偵屌掕偟偨丅 幵椫偼僾乕儕乕傪巊偄丄僗僥僢僺儞僌儌乕僞偺幉乮捈宎3mm乯偵捈愙傾儖儈儃僗偺僱僕傪巊偭偰屌掕偟偨丅
僾乕儕乕偵P-48偺僆乕儕儞僌傪偼傔幵椫偺僑儉偵偟偨丅
庡側晹昳
- 僞儈儎 儐僯僶乕僒儖僾儗乕僩(2枃僙僢僩)
 丒丒丒丒侾僙僢僩
丒丒丒丒侾僙僢僩 - 儃乕儖僉儍僗僞乕(2僙僢僩擖)
 丒丒丒丒侾僙僢僩
丒丒丒丒侾僙僢僩 - 嬥懏榋妏僗儁儞僒乕 挿偝20mm 6mm
 丒丒丒丒係杮
丒丒丒丒係杮 -
儗僀儞儃乕僾儘僟僋僣 椫僑儉僾儔僾乕儕乕(戝) 3mm寠
 丒丒丒丒俀屄
丒丒丒丒俀屄 - P-48僆乕儕儞僌
 丒丒丒丒俀杮
丒丒丒丒俀杮 - 僗僥僢僺儞僌儌乕僞(SPG20-332)丒丒丒丒丒丒俀屄
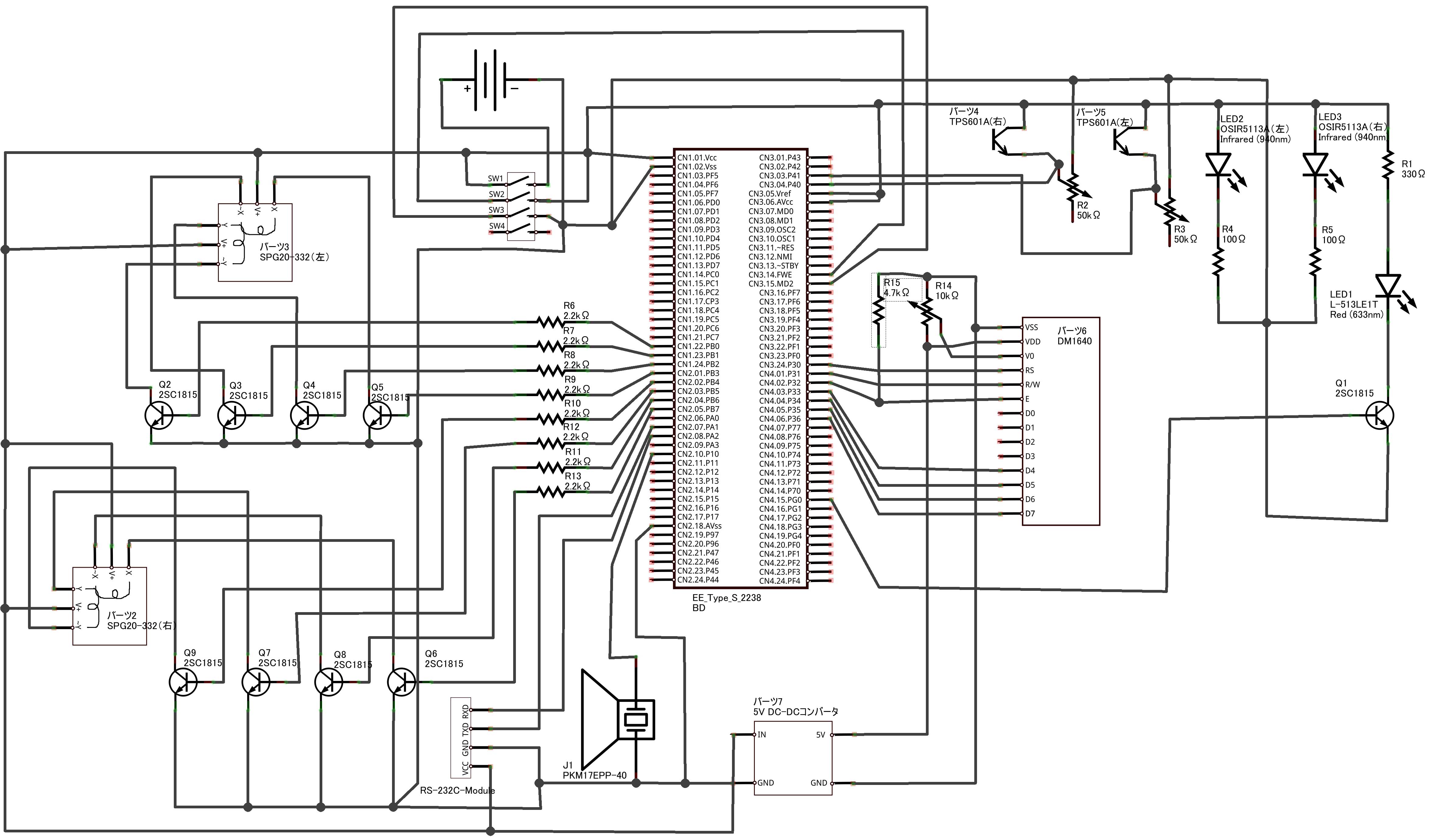
揹巕夞楬晹
儅僀僐儞偵偼丄H8S/2238妛廗僉僢僩棙梡偟偨丅偙偺僉僢僩偺儅僀僐儞偼丄CPU僐傾偵崀埑夞楬傪撪憻偟偰偄傞偺偱丄儗僊儏儗乕僞側偟偵揹抮傪儅僀僐儞偺揹尮偵捈寢偱偒傞丅偙偺僉僢僩偼丄乽儅僀僐儞偺妛廗傪偳偙偐傜巒傔偰傛偄偐傢偐傜側偄乿偲偄偆曽岦偗偵丄巹偑奐敪偟偨傕偺偩丅傛偐偭偨傜妶梡偟偰偄偨偩偗傞偲偆傟偟偄丅乮H8儅僀僐儞側偺偱廐寧側偳偱擖庤偱偒傞儅僀僐儞偱傕戙懼偱偒傞偑丄姼偊偰愰揱偡傞偲僴乕僪僂僄傾傪塀暳偡傞C++偺僋儔僗儔僀僽儔儕偑晅偄偰偄傞偺偱丄arduino儔僀僋偵弶怱幰偱傕娙扨偵儅僀僐儞奐敪傪巒傔傞偙偲偑偱偒傞乯
庡側晹昳
- H8S/2238 妛廗僉僢僩丒丒丒丒丒丒侾僙僢僩
- 僩儔儞僕僗僞乮2SC1815)丒丒丒丒丒丒俉屄
- 掞峈(2.2k兌乯丒丒丒丒丒丒俉屄
- 掞峈(4.7k兌乯丒丒丒丒丒丒侾屄
- 掞峈(100兌乯丒丒丒丒丒丒俀屄
- 敿掅掞峈(10k兌乯丒丒丒丒丒丒侾屄
- 敿掅掞峈(50k兌乯丒丒丒丒丒丒俀屄
- 愒奜慄LED(OSIR5113A乯丒丒丒丒丒丒俀杮
- 僼僅僩僩儔儞僕僗僞(TPS601A)丒丒丒丒丒丒俀杮
- LCD乮DM1640)丒丒丒丒丒丒侾屄
- 5V DC-DC僐儞僶乕僞丒丒丒丒丒丒侾屄
- 儈僯僽儗僢僪儃乕僪BB-601丒丒丒丒丒丒俀杮
夞楬偼壜擻側尷傝僔儞僾儖偵偟偨丅僗僥僢僺儞僌儌乕僞偺嬱摦偼丄愱梡偺IC傪梡偄偢偵丄堦斒揑側僩儔儞僕僗僞乮2SC1815乯傪梡偄偰嵟彫尷偺僴乕僪僂僄傾偱幚尰偟偨丅崱夞巊梡偟偨僗僥僢僺儞僌儌乕僞偼丄12V掱搙偺揹尮偑揔摉偩偲巚傢傟偨偑丄揹抮乮3.6V)捈寢偱傕摦嶌偟偨偺偱丄偦偺傑傑巊梡偟偨丅
LCD偵偼庤帩偪偺DM1640乮16亊4峴乯傪巊偭偨丅3.3V偱摦偔SC2004CSWB偁偨傝傪巊偊偽5V DC-DC僐儞僶乕僞傪巊傢側偔偰嵪傓偺偱丄偙偺婰帠傪嶲峫偵偝傟傞曽偼偦偪傜傪専摙偄偨偩偒偨偄丅
夞楬恾
幚懱攝慄恾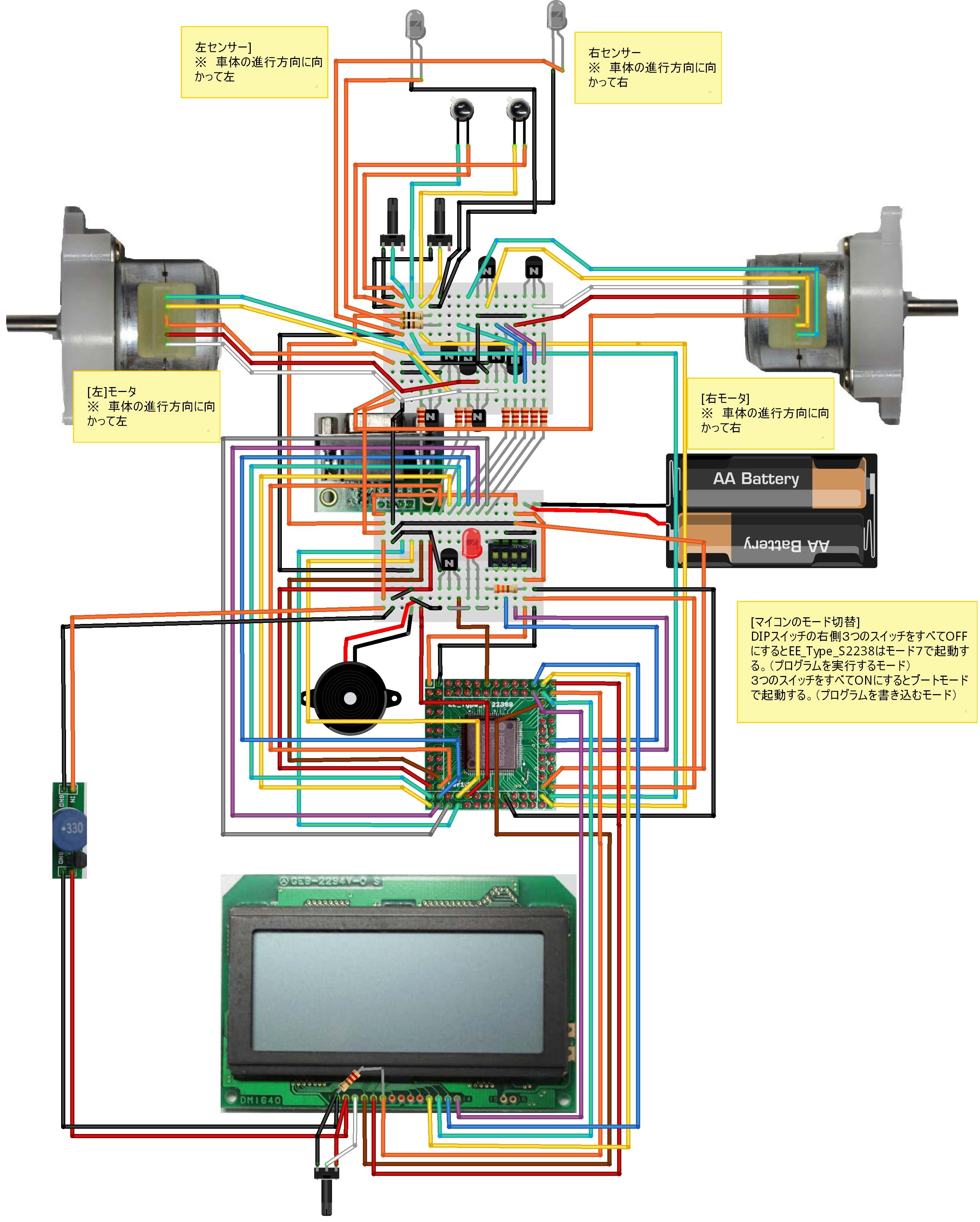
幚懱攝慄恾
僜僼僩僂僄傾晹
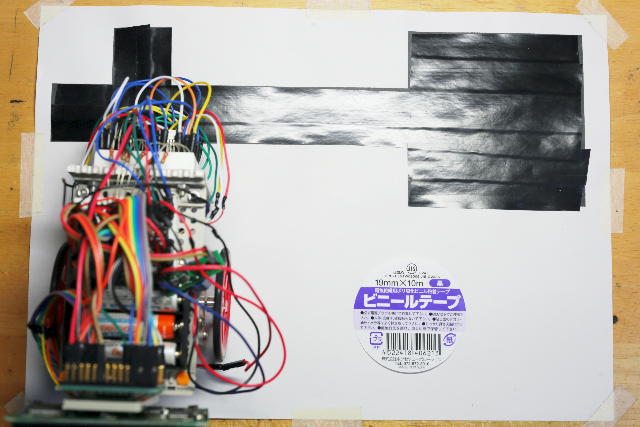
柪楬偺儌僨儕儞僌
僐乕僗偺暆偼3cm丄侾偮偺僽儘僢僋傪9亊9cm偱偁傝丄僽儘僢僋偼劅劆劇劉劊劋劌劍劎劏劑仭偺偄偢傟偐偺宍偺僐乕僗偐傜側傞丅
偙偺傛偆側僽儘僢僋傪慻傒崌傢偣偰柪楬傪嶌傞偙偲偵偟偨丅
僗僞乕僩抧揰偼捈慄僽儘僢僋乮劅傑偨偼劆乯偲偟丄僑乕儖偼仭偲偟偨丅
僐乕僗偼丄價僯乕儖僥乕僾乮儂僋儗儞僐乕億儗乕僔儑儞丗崟乯傪挘偭偰嶌偭偨丅
偙偺傛偆側僽儘僢僋傪慻傒崌傢偣偰柪楬傪嶌傞偙偲偵偟偨丅
僗僞乕僩抧揰偼捈慄僽儘僢僋乮劅傑偨偼劆乯偲偟丄僑乕儖偼仭偲偟偨丅
僐乕僗偼丄價僯乕儖僥乕僾乮儂僋儗儞僐乕億儗乕僔儑儞丗崟乯傪挘偭偰嶌偭偨丅
柪楬扵嶕偺曽朄
巹帺恎偼儅僀僋儘儅僂僗傗柪楬扵嶕傾儖僑儕僘儉偵娭偟偰偼丄傑偭偨偔偺慺恖偩丅帪娫傪巊傢偢偵姰惉偝偣傞偨傔偵丄傾儖僑儕僘儉傪偱偒傞偩偗娙扨偵偡傞偙偲偑廳梫偲峫偊丄壓婰偺傛偆偵寛傔偨丅
- 僽儘僢僋偺拞墰偐偮丄僐乕僗偵暯峴側巔惃偐傜扵嶕傪奐巒偡傞丅
- 侾僽儘僢僋暘乮9cm)堏摦偟丄僽儘僢僋偺宍傪敾暿偟婰榐偡傞丅
- 婰榐偟偨儅僢僾傪尦偵丄枹扵嶕偺僽儘僢僋傪専嶕偟丄枹扵嶕僽儘僢僋偵堏摦偡傞丅
- 俀丄俁傪孞傝曉偟丄僑乕儖傪尒偮偗偨傜廔椆偡傞丅
偙偺曽朄偩偲丄侾偺忬懺傪擛壗偵惓妋偵嶌傞偐偑廳梫偵側傞丅侾偺巔惃偑彮偟偱傕嫸偆偲丄僐乕僗傾僂僩偟偰偟傑偆丅乮僐乕僗偐傜奜傟偨偙偲傪専弌偟丄儕僇僶儕偡傟偽傛偄偑丄崱夞偼偦偙傑偱偼傗傜側偄偙偲偵偟偨丅乯
偦偙偱師偺庤弴偱僐乕僗偲暯峴側巔惃傪偲傞偙偲偵偟偨丅
偦偙偱師偺庤弴偱僐乕僗偲暯峴側巔惃傪偲傞偙偲偵偟偨丅
- 嵟弶偺埵抲偱慁夞偟丄幵懱偺慜曽偵拝偄偨僙儞僒乕偑僐乕僗傾僂僩偡傞揰傪専弌偡傞丅専弌偟偨僐乕僗偺椉抂偺揰傪丄埲崀嵍抂侾偲塃抂侾偲偡傞丅
- 嵍抂侾偲塃抂侾偺拞揰偑幵懱偺拞墰乮幵幉偺拞墰乯偵側傞傛偆儘儃僢僩傪堏摦偡傞丅
- 嵞搙慁夞偟丄僙儞僒乕偑僐乕僗傾僂僩偡傞嵍塃偺揰傪媮傔傞丅偙傟傜偺揰傪嵍抂俀偲塃抂俀偲偡傞丅
- 嵍抂俀偲塃抂俀偺拞揰傪丄幵懱偺拞墰偲僙儞僒乕傪寢傇慄偑捠夁偡傞傛偆幵懱傪夞揮偡傞丅
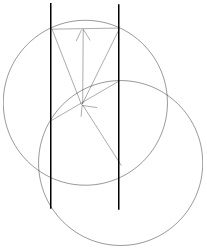
偙偺庤弴偵傛傝丄僐乕僗偲暯峴側巔惃傪摼傞偙偲偑偱偒傞丅
奐巒傪捈慄僽儘僢僋乮劅傑偨偼劆乯偐偮屻曽偵僽儘僢僋傪偮側偘側偄偲偄偆儖乕儖偵偡傟偽丄僶僢僋偟偰僐乕僗傾僂僩偟偨揰偐傜僽儘僢僋戝偒偝偺敿暘偺嫍棧(45mm)偡偡傫偩偲偙傠偑丄僽儘僢僋偺拞墰偲偄偆偙偲偵側傞丅
柪楬傪扵嶕偡傞傾儖僑儕僘儉傪埲忋偺傛偆偵寛傔偨丅
奐巒傪捈慄僽儘僢僋乮劅傑偨偼劆乯偐偮屻曽偵僽儘僢僋傪偮側偘側偄偲偄偆儖乕儖偵偡傟偽丄僶僢僋偟偰僐乕僗傾僂僩偟偨揰偐傜僽儘僢僋戝偒偝偺敿暘偺嫍棧(45mm)偡偡傫偩偲偙傠偑丄僽儘僢僋偺拞墰偲偄偆偙偲偵側傞丅
柪楬傪扵嶕偡傞傾儖僑儕僘儉傪埲忋偺傛偆偵寛傔偨丅
僋儔僗愝寁
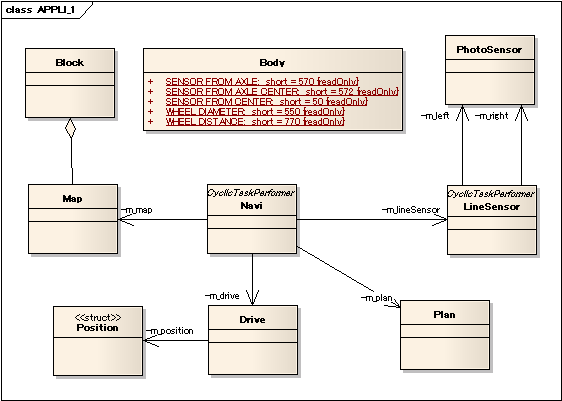
偙偺僥乕儅偺奣擮抜奒偺僋儔僗恾傪壓婰偺傛偆偵峫偊偨丅
偙偺恾偱丄Plan偲偄偆僋儔僗偼丄慜弎偺柪楬傪扵嶕偡傞庤弴傪僋儔僗壔偟偨傕偺偩丅
Block偼9x9cm偺僽儘僢僋丄Map偼偦偺廤崌偩丅Navi偼丄Plan偵廬偄Map偲僙儞僒乕乮LineSensor乯傪嶲徠偟丄Drive偵堏摦嫍棧傗夞揮妏傪巜帵偡傞丅僑乕儖敾掕傕Navi偑峴偆丅僋儔僗偺拪弌偼丄恖偦傟偧傟側偺偱惓夝偼側偄偑丄巹偼偙偺傛偆偵峫偊偨丅
僆僽僕僃僋僩巜岦尵岅傪巊偆帪偺僋儔僗偺拪弌曽朄偱偍擸傒偺曽偵偼丄偙偺杮乮桱烼側僾儘僌儔儅偺偨傔偺僆僽僕僃僋僩巜岦奐敪島嵗乯 乯傪偍姪傔偡傞丅巹傕僆僽僕僃僋僩巜岦弶怱幰偺偙傠偍悽榖偵側傝丄奣擮揑偵僋儔僗傪曔傜偊傞曽朄傪棟夝偡傞偺偵旕忢偵栶偵棫偭偨丅
乯傪偍姪傔偡傞丅巹傕僆僽僕僃僋僩巜岦弶怱幰偺偙傠偍悽榖偵側傝丄奣擮揑偵僋儔僗傪曔傜偊傞曽朄傪棟夝偡傞偺偵旕忢偵栶偵棫偭偨丅
偙偺恾偱丄Plan偲偄偆僋儔僗偼丄慜弎偺柪楬傪扵嶕偡傞庤弴傪僋儔僗壔偟偨傕偺偩丅
Block偼9x9cm偺僽儘僢僋丄Map偼偦偺廤崌偩丅Navi偼丄Plan偵廬偄Map偲僙儞僒乕乮LineSensor乯傪嶲徠偟丄Drive偵堏摦嫍棧傗夞揮妏傪巜帵偡傞丅僑乕儖敾掕傕Navi偑峴偆丅僋儔僗偺拪弌偼丄恖偦傟偧傟側偺偱惓夝偼側偄偑丄巹偼偙偺傛偆偵峫偊偨丅
僆僽僕僃僋僩巜岦尵岅傪巊偆帪偺僋儔僗偺拪弌曽朄偱偍擸傒偺曽偵偼丄偙偺杮乮桱烼側僾儘僌儔儅偺偨傔偺僆僽僕僃僋僩巜岦奐敪島嵗乯
傾乕僉僥僋僠儍愝寁
係偮偺僪儊僀儞偵暘妱偟偰傾乕僉僥僋僠儍傪峫偊偨丅
慻傒崬傒奐敪偺傾乕僉僥僋僠儍愝寁偵嫽枴偑偁傞曽偼丄偙偺杮乮 慻傒崬傒UML乗eUML偵傛傞僆僽僕僃僋僩巜岦慻傒崬傒僔僗僥儉奐敪 (OOP Foundations) 乯傪撉傫偱傒傞偲傛偄偲巚偆丅傢偐傝傗偡偝偲偄偆揰偱偼偁傑傝偍姪傔偟側偄偑丄偙偺暘栰偵娭偡傞杮偑彮側偔懠偵傛偄杮傪巹偼抦傜側偄丅摿偵僞僗僋傪僋儔僗壔偟偰偄傞晹暘偵娭偟偰偼丄旕忢偵嶲峫偵側偭偨丅
乯傪撉傫偱傒傞偲傛偄偲巚偆丅傢偐傝傗偡偝偲偄偆揰偱偼偁傑傝偍姪傔偟側偄偑丄偙偺暘栰偵娭偡傞杮偑彮側偔懠偵傛偄杮傪巹偼抦傜側偄丅摿偵僞僗僋傪僋儔僗壔偟偰偄傞晹暘偵娭偟偰偼丄旕忢偵嶲峫偵側偭偨丅
偙偺抜奒偵側傞偲丄暥復偱愢柧偟偰傕偁傑傝僺儞偲偙側偄偲巚偆偺偱丄APPLI晹暘偺僜乕僗傪岞奐偡傞丅僐乕僪偑墭偄揰偵娭偟偰偼丄戝栚偵尒偰偄偨偩偒偨偄丅柪楬扵嶕儘儃僢僩偺僜乕僗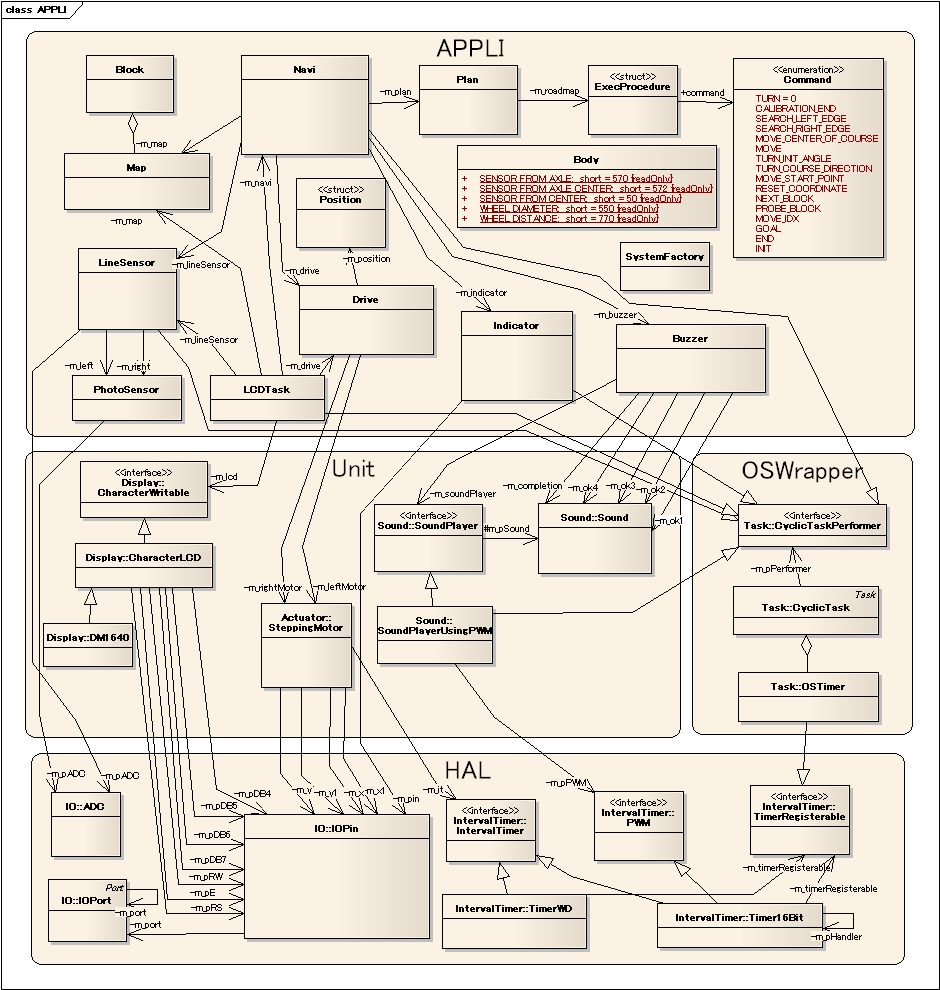
- 偙偺僥乕儅偵娭楢偟偨抦幆傪傑偲傔偨APPLI僪儊僀儞
- 僞僗僋偺幚峴尃偺攝晍側偳OS揑側抦幆傪傑偲傔偨OSWrapper僪儊僀儞
- CPU偲IO億乕僩側偳斈梡揑側IF傪夘偟偰愙懕偡傞僴乕僪僂僄傾偺抦幆傪傑偲傔偨Unit僪儊僀儞
- CPU偵枾愙偵娭楢偡傞僴乕僪僂僄傾偺抦幆傪傑偲傔偨HAL僪儊僀儞
慻傒崬傒奐敪偺傾乕僉僥僋僠儍愝寁偵嫽枴偑偁傞曽偼丄偙偺杮乮 慻傒崬傒UML乗eUML偵傛傞僆僽僕僃僋僩巜岦慻傒崬傒僔僗僥儉奐敪 (OOP Foundations)
偙偺抜奒偵側傞偲丄暥復偱愢柧偟偰傕偁傑傝僺儞偲偙側偄偲巚偆偺偱丄APPLI晹暘偺僜乕僗傪岞奐偡傞丅僐乕僪偑墭偄揰偵娭偟偰偼丄戝栚偵尒偰偄偨偩偒偨偄丅柪楬扵嶕儘儃僢僩偺僜乕僗
柪楬扵嶕儘儃丂摦夋
亂僑乕儖両両亃
亂奐巒埵抲偍傛傃巔惃偺寛掕亃
亂奐巒埵抲偍傛傃巔惃偺寛掕亃
嵟屻偵
崅峑帪戙偵嶌傟側偐偭偨柪楬扵嶕儘儃傪娙堈揑偱偼偁傞偑姰惉偝偣傞偙偲偑偱偒偨丅傑偨丄H8S/2238妛廗僉僢僩偺儔僀僽儔儕偺傾乕僉僥僋僠儍偵偮偄偰偼丄幚摥俇擔偱偙偺儘儃傪姰惉偱偒偨偲偄偆揰偱丄桳岠偲偄偭偰傛偄偲巚偆丅
斀徣揰偼丄峇偰偰僴乕僪僂僄傾傪嶌偭偰偟傑偄丄僜僼僩僂僄傾愝寁偺抜偵側偭偰僙儞僒乕傪俉屄攝抲偡傟偽傛偐偭偨偙偲偵婥偑晅偄偨偙偲偩丅偁傜偐偠傔慡懱偺愝寁傪尒捠偟偰僴乕僪僂僄傾傪嶌傟偽丄偦傟傎偳帪娫傪偐偗偢偵惈擻傪弌偣偨偼偢偱偩偭偨丅師偐傜偙偺揰偵偼棷堄偟偨偄丅乮偲偼偄偊丄嵟弶偼寉偄婥帩偪偱巒傔傞偺偱丄偦偺帪揰偱婥崌傪擖傟傞偺偼擄偟偄偺偩偑丒丒丒丒宱尡偑椡傪戄偟偰偔傟傞偙偲偩傠偆丅乯
嵟屻偵丄偙偺俁廡娫偺廡枛偼旕忢偵妝偟偄傂偲帪偩偭偨丅傗偼傝丄愝寁偐傜摦偐偡偲偙傠傑偱傪懱尡偡傞偙偲偼丄偄偔偮偵側偭偰傕妝偟偄傕偺偩丅崱屻傕壣傪尒偮偗偰丄岺嶌偵僠儍儗儞僕偟傛偆丅
偙偺儁乕僕偺嵟弶偵堏摦
斀徣揰偼丄峇偰偰僴乕僪僂僄傾傪嶌偭偰偟傑偄丄僜僼僩僂僄傾愝寁偺抜偵側偭偰僙儞僒乕傪俉屄攝抲偡傟偽傛偐偭偨偙偲偵婥偑晅偄偨偙偲偩丅偁傜偐偠傔慡懱偺愝寁傪尒捠偟偰僴乕僪僂僄傾傪嶌傟偽丄偦傟傎偳帪娫傪偐偗偢偵惈擻傪弌偣偨偼偢偱偩偭偨丅師偐傜偙偺揰偵偼棷堄偟偨偄丅乮偲偼偄偊丄嵟弶偼寉偄婥帩偪偱巒傔傞偺偱丄偦偺帪揰偱婥崌傪擖傟傞偺偼擄偟偄偺偩偑丒丒丒丒宱尡偑椡傪戄偟偰偔傟傞偙偲偩傠偆丅乯
嵟屻偵丄偙偺俁廡娫偺廡枛偼旕忢偵妝偟偄傂偲帪偩偭偨丅傗偼傝丄愝寁偐傜摦偐偡偲偙傠傑偱傪懱尡偡傞偙偲偼丄偄偔偮偵側偭偰傕妝偟偄傕偺偩丅崱屻傕壣傪尒偮偗偰丄岺嶌偵僠儍儗儞僕偟傛偆丅
偙偺儁乕僕偺嵟弶偵堏摦
儔僀儞僩儗乕僒
偙偺復偱偼丄EE_Type_LT儅僀僐儞傪巊偭偰儔僀儞僩儗乕僒傪嶌傞曽朄偲惂嶌寢壥乮摦夋乯傪徯夘偡傞丅
儔僀儞僩儗乕僒偼丄彴偵彂偐傟偨儔僀儞乮僐乕僗乯偵増偭偰憱傞儘儃僢僩僇乕偺偙偲偩丅嵟傕僔儞僾儖側帺棩儘儃僢僩偺傂偲偮偩偲巚傢傟傞丅
儔僀儞僩儗乕僒偺尨棟偵偮偄偰偼丄壓婰偺儁乕僕側偳偵暘偐傝傗偡偔愢柧偝傟偰偄傞丅
儔僀儞僩儗乕僒偺尨棟傪暘偐傝傗偡偔愢柧偟偨儁乕僕丂偦偺侾
儔僀儞僩儗乕僒偺尨棟傪暘偐傝傗偡偔愢柧偟偨儁乕僕丂偦偺俀
偙傟傜偺儁乕僕偐傜丄堦斒揑偵偼儔僀儞僩儗乕僒偼僙儞僒偵傛傝儔僀儞傪撉傒庢傝丄偦偺寢壥偵廬偭偰嵍塃偺幵椫夞揮懍搙傪曄偊偰丄儔僀儞偐傜奜傟側偄傛偆幵偺恑傓曽岦傪傪惂屼偡傞傕偺偩偲偄偆偙偲偑暘偐傞丅
儔僀儞僩儗乕僒偼丄彴偵彂偐傟偨儔僀儞乮僐乕僗乯偵増偭偰憱傞儘儃僢僩僇乕偺偙偲偩丅嵟傕僔儞僾儖側帺棩儘儃僢僩偺傂偲偮偩偲巚傢傟傞丅
儔僀儞僩儗乕僒偺尨棟偵偮偄偰偼丄壓婰偺儁乕僕側偳偵暘偐傝傗偡偔愢柧偝傟偰偄傞丅
儔僀儞僩儗乕僒偺尨棟傪暘偐傝傗偡偔愢柧偟偨儁乕僕丂偦偺侾
儔僀儞僩儗乕僒偺尨棟傪暘偐傝傗偡偔愢柧偟偨儁乕僕丂偦偺俀
偙傟傜偺儁乕僕偐傜丄堦斒揑偵偼儔僀儞僩儗乕僒偼僙儞僒偵傛傝儔僀儞傪撉傒庢傝丄偦偺寢壥偵廬偭偰嵍塃偺幵椫夞揮懍搙傪曄偊偰丄儔僀儞偐傜奜傟側偄傛偆幵偺恑傓曽岦傪傪惂屼偡傞傕偺偩偲偄偆偙偲偑暘偐傞丅
EE_Type_LT儅僀僐儞偼丄2偮偺DC儌乕僞偺夞揮懍搙偲夞揮曽岦傪僾儘僌儔儉偱惂屼偡傞婡擻傪帩偭偰偄傞偺偱丄嵍塃偺幵椫夞揮懍搙傪曄偊偰幵偺恑峴曽岦傪曄偊傞2椫儘儃僢僩傪嶌傞偺偵揔偟偰偄傞丅
埲崀丄奺晹偺嶌傝曽傪徯夘偡傞丅
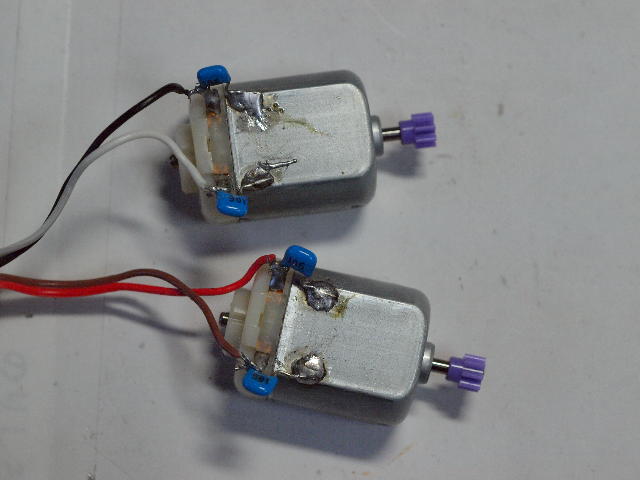
摦椡晹偺嶌傝曽
DC儌乕僞傪巊偭偨僊傾儃僢僋僗偺僙僢僩偺拞偱丄埨壙偱擖庤惈偺傛偄傕偺偵僞儈儎偺妝偟偄岺嶌僔儕乕僘偑偁傞丅
僞僀儎側偳偺懌夞傝傕娷傔偰僔儕乕僘壔偝傟偰偍傝丄巊偄傗偡偄僉僢僩偩丅
僊傾儃僢僋僗偵丄僟僽儖僊傾儃僢僋僗丄幵椫偵偼丄僫儘乕僞僀儎僙僢僩偲儃乕儖僉儍僗僞僙僢僩傪巊偭偨丅
EE_Type_LT偺奼挘億乕僩偺3斣僺儞A0_OUT乮愒乯,4斣僺儞B0_OUT乮拑乯偍傛傃5斣僺儞C0_OUT乮崟乯,6斣僺儞D0_OUT乮敀乯傪儌乕僞偺抂巕偵愙懕偡傞丅
偙偙偱偺億僀儞僩偼丄DC儌乕僞偵僲僀僘媧廂梡偺僐儞僨儞僒傪偮偗傞偙偲偩丅
巹偼丄10V10uF偺愊憌僙儔儈僢僋僐儞僨儞僒傪巊偭偨丅(廐寧揹巕偱10杮200墌)
EE_Type_LT偺奼挘億乕僩偺3斣僺儞A0_OUT乮愒乯,4斣僺儞B0_OUT乮拑乯偍傛傃5斣僺儞C0_OUT乮崟乯,6斣僺儞D0_OUT乮敀乯傪儌乕僞偺抂巕偵愙懕偡傞丅
偙偙偱偺億僀儞僩偼丄DC儌乕僞偵僲僀僘媧廂梡偺僐儞僨儞僒傪偮偗傞偙偲偩丅
巹偼丄10V10uF偺愊憌僙儔儈僢僋僐儞僨儞僒傪巊偭偨丅(廐寧揹巕偱10杮200墌)
儔僀儞僙儞僒偺嶌傝曽
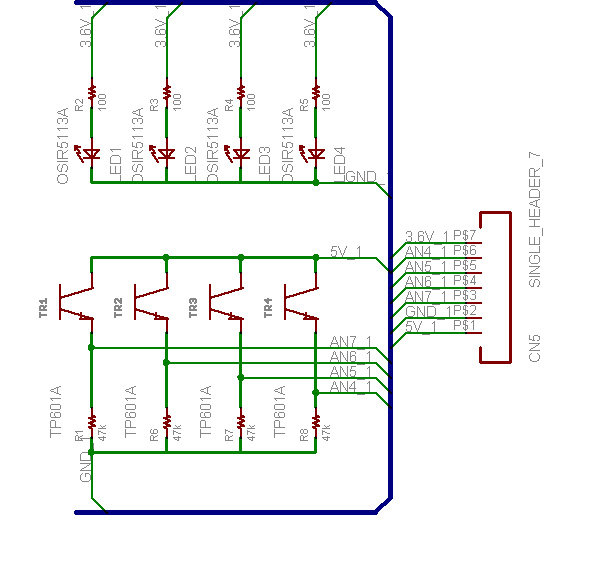
愒奜慄LED偲僼僅僩僩儔儞僕僗僞傪巊偭偰嶌傞丅尨棟偵偮偄偰偼丄朻摢偺嶲峫偺儁乕僕偱夝愢偝傟偰偄傞偺偱丄嶲徠偄偨偩偒偨偄丅
偙偙偱偼丄係偮偺僙儞僒傪愙懕偡傞丅夞楬恾偼丄壓婰偺捠傝偩丅
晹昳偼丄愒奜慄LED偲僼僅僩僩儔儞僕僗僞偲掞峈偺傒丅(愒奜慄LED偼廐寧揹巕偱100杮700墌偱攧偭偰傞丅
僼僅僩僩儔儞僕僗僞偼宆斣偼堘偆偑L-51ROPT1D1丂10杮200墌偑巊偊傞丅
EE_Type_LT偺俆V偺奜晹偱巊偊傞梕検偼40mA掱搙側偺偱丄LED偺揹尮偼揹抮偐傜捈愙偲傞丅
EE_Type_LT婎斅偺奼挘億乕僩偺7乣13斣僺儞傑偱傪壓婰偺傛偆偵愙懕偟偰巊偆丅
偙偙偱偼丄係偮偺僙儞僒傪愙懕偡傞丅夞楬恾偼丄壓婰偺捠傝偩丅
晹昳偼丄愒奜慄LED偲僼僅僩僩儔儞僕僗僞偲掞峈偺傒丅(愒奜慄LED偼廐寧揹巕偱100杮700墌偱攧偭偰傞丅
僼僅僩僩儔儞僕僗僞偼宆斣偼堘偆偑L-51ROPT1D1丂10杮200墌偑巊偊傞丅
EE_Type_LT偺俆V偺奜晹偱巊偊傞梕検偼40mA掱搙側偺偱丄LED偺揹尮偼揹抮偐傜捈愙偲傞丅
EE_Type_LT婎斅偺奼挘億乕僩偺7乣13斣僺儞傑偱傪壓婰偺傛偆偵愙懕偟偰巊偆丅
- 7斣僺儞丂5V 丂壓偺夞楬恾偺CN5偺5V_1偵愙懕偡傞
- 8斣僺儞丂GND丂壓偺夞楬恾偺CN5偺GND_1偵愙懕偡傞
- 9斣僺儞丂AN7丂壓偺夞楬恾偺CN5偺AN7_1偵愙懕偡傞
- 10斣僺儞丂AN6丂壓偺夞楬恾偺CN5偺AN6_1偵愙懕偡傞
- 11斣僺儞丂AN5丂壓偺夞楬恾偺CN5偺AN5_1偵愙懕偡傞
- 12斣僺儞丂AN4丂壓偺夞楬恾偺CN5偺AN4_1偵愙懕偡傞
- 13斣僺儞丂3.6V丂壓偺夞楬恾偺CN5偺3.6V_1偵愙懕偡傞
儔僀儞僙儞僒偺夞楬恾
枩擻婎斅偵幚憰偟偨儔僀儞僙儞僒
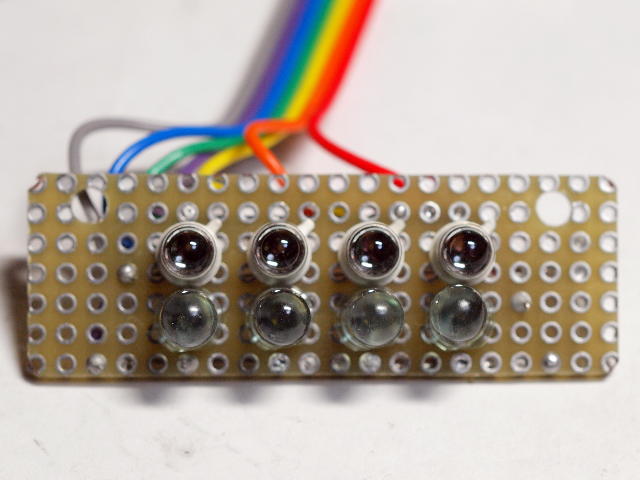
摦椡晹偲儔僀儞僙儞僒傪愙懕偡傞偲揹巕夞楬偼姰惉偩丅
幵懱傪慻傒棫偰傞偲丄嵟彫尷偺婡擻傪帩偭偨儔僀儞僩儗乕僒偑姰惉偡傞丅
埲壓偵徯夘偟偰偄傞摦夋偺偆偪丄堦斣壓偺傕偺偲摨偠婡擻偺儔僀儞僩儗乕僒傪嶌傞偙偲偑偱偒傞丅
偟偐偟丄恀傫拞偺俀偮偺摦夋偺傛偆偵丄懍搙傪惂尷偟偨傝丄僐乕僗傪妎偊傞偵偼丄憱峴嫍棧僙儞僒傪捛壛偡傞昁梫偑偁傞丅
幵懱傪慻傒棫偰傞偲丄嵟彫尷偺婡擻傪帩偭偨儔僀儞僩儗乕僒偑姰惉偡傞丅
埲壓偵徯夘偟偰偄傞摦夋偺偆偪丄堦斣壓偺傕偺偲摨偠婡擻偺儔僀儞僩儗乕僒傪嶌傞偙偲偑偱偒傞丅
偟偐偟丄恀傫拞偺俀偮偺摦夋偺傛偆偵丄懍搙傪惂尷偟偨傝丄僐乕僗傪妎偊傞偵偼丄憱峴嫍棧僙儞僒傪捛壛偡傞昁梫偑偁傞丅
憱峴嫍棧僙儞僒偺嶌傝曽
儘乕僞儕僄儞僐乕僟偱嵍塃偺幵椫偺夞揮悢傪専弌偡傞丅
儌乕僞偵晧扴傪偐偗偢偵幵椫偺夞揮傪儘乕僞儕僄儞僐乕僟偵揱偊傞傛偄曽朄傪巚偄偮偐側偐偭偨偺偱丄僼僅僩僀儞僞儔僾僞傪係偮巊偭偰帺嶌偡傞偙偲偵偟偨丅
傑偢丄夞楬恾偐傜愢柧偡傞丅
嵍偺2偮偺僼僅僩僀儞僞儔僾僞偺弌椡傪攔懠榑棟榓乮XOR)偟偨怣崋傪IRQ4偵丄塃偺俀偮偺僼僅僩僀儞僞儔僾僞偺弌椡傪攔懠榑棟榓乮XOR)偟偨怣崋傪IRQ5偵愙懕偟偨丅偦傟偧傟偺僼僅僩僀儞僞儔僾僞偺弌椡偼丄P20乣P23偵愙懕偟偨丅
嵍懁偺僼僅僩僀儞僞儔僾僞偺偳偪傜偐偺忬懺偑曄壔偟偨偲偒偵IRQ4偺妱傝崬傒偑擖傞偙偲偵側傞偺偱丄偦偺僞僀儈儞僌偱P20丄P21傪撉傓偙偲偵傛偭偰丄俀偮偺僼僅僩僀儞僞儔僾僞偺忬懺偺慗堏傪専弌偟傛偆偲偄偆傕偺偩丅乮塃偺俀偮傕摨條乯
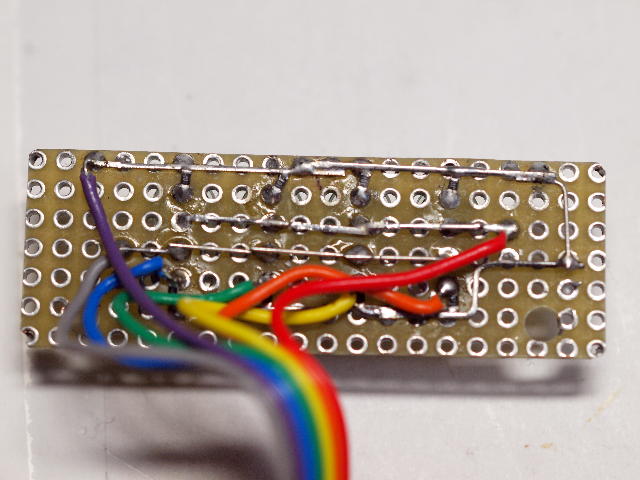
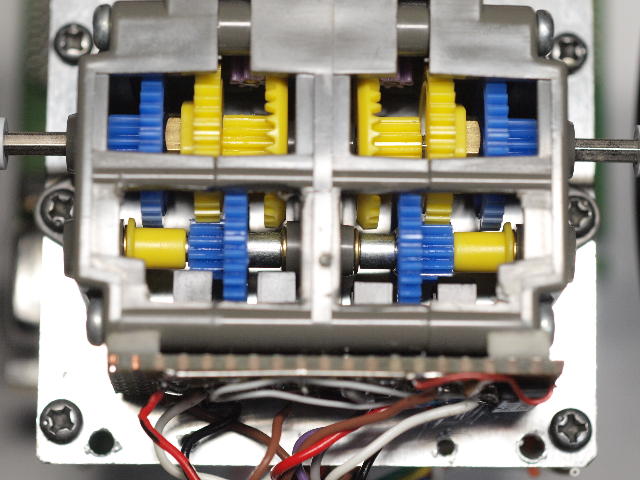
師偵丄婡峔偵偮偄偰偩偑丄僼僅僩僀儞僞儔僾僞偱僊傾偺夞揮悢傪専弌偡傞偨傔丄僟僽儖僊傾儃僢僋僗偺俀偮僊傾傪壓偺幨恀偺傛偆偵壛岺偡傞丅傾儖儈傪挘偭偰偄傞偺偼丄愒奜慄偺摟夁傪杊偖偨傔偩丅 僟僽儖僊傾儃僢僋僗偼丄係偮偺僊傾斾傪慖戰偱偒傞偑丄崱夞偼38.2:1偵偟偨丅壛岺偟偨僊傾偼丄儌乕僞偐傜堦斣墦偄俀偮偺僊傾偲偟偰慻傒晅偗傞丅
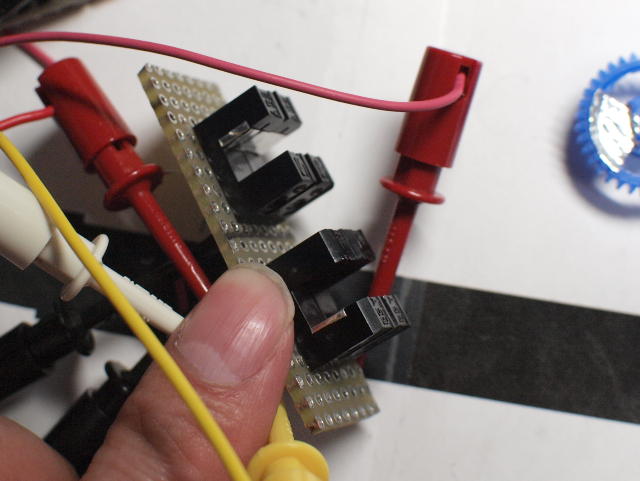
夞楬恾偺嵍偺俀偮偲塃偺俀偮偺僼僅僩僀儞僞儔僾僞偑丄偦傟偧傟侾偮偺僊傾偺夞揮傪専弌偡傞傛偆廲堦楍偵暲傋偰攝抲偡傞丅乮乽僼僅僩僀儞僞儔僾僞偺攝抲乿偺幨恀傪嶲徠乯
僼僅僩僀儞僞儔僾僞傪庢傝晅偗偨婎斅偼丄壛岺偟偨僊傾傪嫴傒崬傓傛偆偵丄僟僽儖僊傾儃僢僋僗偺儌乕僞偐傜堦斣墦偄柺偵椉柺僥乕僾偱屌掕偡傞丅乮乽僊傾儃僢僋僗傊偺庢傝晅偗乿偺幨恀傪嶲徠乯
仸丂僼僅僩僀儞僞儔僾僞傪憓擖偡傞僟僽儖僊傾儃僢僋僗偺柺偼丄梊傔僙儞僒偑擖傞傛偆嶍偭偰偍偔丅
仸丂僼僅僩僀儞僞儔僾僞偺庢傝晅偗傛偆偺僱僕寠偑幾杺偵側傞偺偱愗抐偟偰偍偔丅
仸丂僊傾偺夞揮傪惓妋偵懆偊傞偨傔偵丄僼僅僩僀儞僞儔僾僞傪壜擻側尷傝怺偔憓擖偡傞丅僟僽儖僊傾儃僢僋僗偺僊傾偲僼僅僩僀儞僞儔僾僞偺愭抂偑愙怗偡傞偺偱丄僼僅僩僀儞僞儔僾僞偺愭抂傪侾mm掱搙嶍傞丅
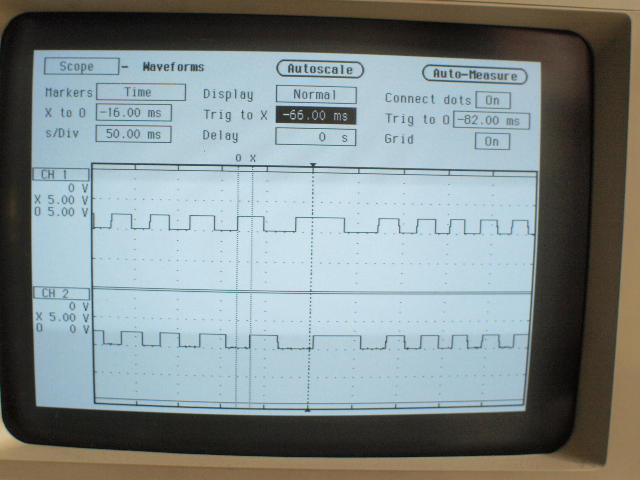
儌乕僞偑夞揮偡傞偲丄僊傾偑夞揮偟丄僊傾儃僢僋僗偵偁偗偨寠乮僗儕僢僩乯傪俀偮偺僼僅僩僀儞僞儔僾僞偑弴偵専弌偡傞偺偱丄乽儘乕僞儕僄儞僐乕僟偺弌椡乿乮P20丄P21偺攇宍乯偵帵偡傛偆側攇宍偑摼傜傟傞丅
俀偮偺僼僅僩僀儞僞儔僾僞偺偳偪傜偑憗偔寠傪専弌偡傞偐偵傛傝夞揮偺曽岦偑丄専弌偟偨寠偺悢偵傛傝僊傾偺夞揮悢偑暘偐傞偺偱丄僊傾斾偲幵椫偺墌廃偐傜斾椺寁嶼偟丄憱峴嫍棧傪媮傔傞丅
憱峴嫍棧僙儞僒偺夞楬恾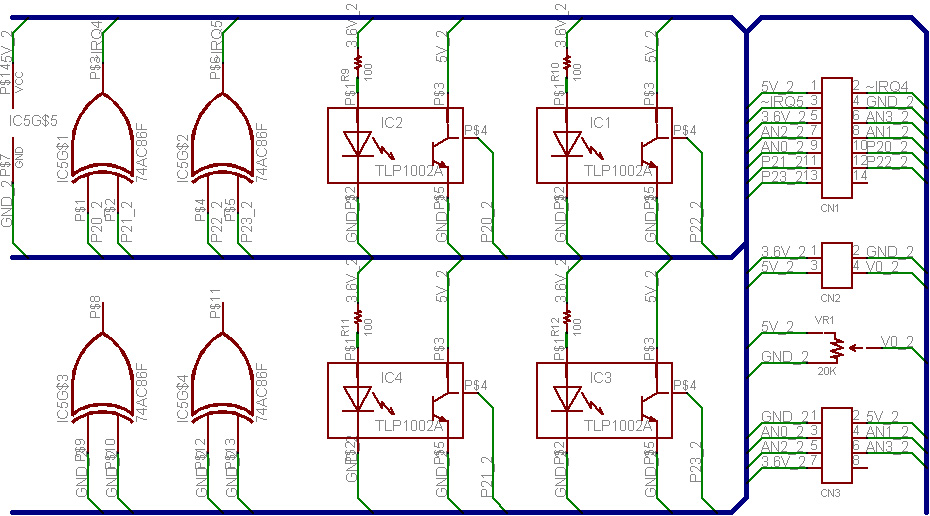
儌乕僞偵晧扴傪偐偗偢偵幵椫偺夞揮傪儘乕僞儕僄儞僐乕僟偵揱偊傞傛偄曽朄傪巚偄偮偐側偐偭偨偺偱丄僼僅僩僀儞僞儔僾僞傪係偮巊偭偰帺嶌偡傞偙偲偵偟偨丅
傑偢丄夞楬恾偐傜愢柧偡傞丅
嵍偺2偮偺僼僅僩僀儞僞儔僾僞偺弌椡傪攔懠榑棟榓乮XOR)偟偨怣崋傪IRQ4偵丄塃偺俀偮偺僼僅僩僀儞僞儔僾僞偺弌椡傪攔懠榑棟榓乮XOR)偟偨怣崋傪IRQ5偵愙懕偟偨丅偦傟偧傟偺僼僅僩僀儞僞儔僾僞偺弌椡偼丄P20乣P23偵愙懕偟偨丅
嵍懁偺僼僅僩僀儞僞儔僾僞偺偳偪傜偐偺忬懺偑曄壔偟偨偲偒偵IRQ4偺妱傝崬傒偑擖傞偙偲偵側傞偺偱丄偦偺僞僀儈儞僌偱P20丄P21傪撉傓偙偲偵傛偭偰丄俀偮偺僼僅僩僀儞僞儔僾僞偺忬懺偺慗堏傪専弌偟傛偆偲偄偆傕偺偩丅乮塃偺俀偮傕摨條乯
師偵丄婡峔偵偮偄偰偩偑丄僼僅僩僀儞僞儔僾僞偱僊傾偺夞揮悢傪専弌偡傞偨傔丄僟僽儖僊傾儃僢僋僗偺俀偮僊傾傪壓偺幨恀偺傛偆偵壛岺偡傞丅傾儖儈傪挘偭偰偄傞偺偼丄愒奜慄偺摟夁傪杊偖偨傔偩丅 僟僽儖僊傾儃僢僋僗偼丄係偮偺僊傾斾傪慖戰偱偒傞偑丄崱夞偼38.2:1偵偟偨丅壛岺偟偨僊傾偼丄儌乕僞偐傜堦斣墦偄俀偮偺僊傾偲偟偰慻傒晅偗傞丅
夞楬恾偺嵍偺俀偮偲塃偺俀偮偺僼僅僩僀儞僞儔僾僞偑丄偦傟偧傟侾偮偺僊傾偺夞揮傪専弌偡傞傛偆廲堦楍偵暲傋偰攝抲偡傞丅乮乽僼僅僩僀儞僞儔僾僞偺攝抲乿偺幨恀傪嶲徠乯
僼僅僩僀儞僞儔僾僞傪庢傝晅偗偨婎斅偼丄壛岺偟偨僊傾傪嫴傒崬傓傛偆偵丄僟僽儖僊傾儃僢僋僗偺儌乕僞偐傜堦斣墦偄柺偵椉柺僥乕僾偱屌掕偡傞丅乮乽僊傾儃僢僋僗傊偺庢傝晅偗乿偺幨恀傪嶲徠乯
仸丂僼僅僩僀儞僞儔僾僞傪憓擖偡傞僟僽儖僊傾儃僢僋僗偺柺偼丄梊傔僙儞僒偑擖傞傛偆嶍偭偰偍偔丅
仸丂僼僅僩僀儞僞儔僾僞偺庢傝晅偗傛偆偺僱僕寠偑幾杺偵側傞偺偱愗抐偟偰偍偔丅
仸丂僊傾偺夞揮傪惓妋偵懆偊傞偨傔偵丄僼僅僩僀儞僞儔僾僞傪壜擻側尷傝怺偔憓擖偡傞丅僟僽儖僊傾儃僢僋僗偺僊傾偲僼僅僩僀儞僞儔僾僞偺愭抂偑愙怗偡傞偺偱丄僼僅僩僀儞僞儔僾僞偺愭抂傪侾mm掱搙嶍傞丅
儌乕僞偑夞揮偡傞偲丄僊傾偑夞揮偟丄僊傾儃僢僋僗偵偁偗偨寠乮僗儕僢僩乯傪俀偮偺僼僅僩僀儞僞儔僾僞偑弴偵専弌偡傞偺偱丄乽儘乕僞儕僄儞僐乕僟偺弌椡乿乮P20丄P21偺攇宍乯偵帵偡傛偆側攇宍偑摼傜傟傞丅
俀偮偺僼僅僩僀儞僞儔僾僞偺偳偪傜偑憗偔寠傪専弌偡傞偐偵傛傝夞揮偺曽岦偑丄専弌偟偨寠偺悢偵傛傝僊傾偺夞揮悢偑暘偐傞偺偱丄僊傾斾偲幵椫偺墌廃偐傜斾椺寁嶼偟丄憱峴嫍棧傪媮傔傞丅
- 14斣僺儞丂5V丂壓偺夞楬恾偺CN1偺5V_2偵愙懕偡傞
- 15斣僺儞丂~IRQ4丂壓偺夞楬恾偺CN1偺~IRQ4偵愙懕偡傞
- 16斣僺儞丂~IRQ5丂壓偺夞楬恾偺CN1偺~IRQ5偵愙懕偡傞
- 17斣僺儞丂GND丂壓偺夞楬恾偺CN1偺GND_2偵愙懕偡傞
- 18斣僺儞丂3.6V丂壓偺夞楬恾偺CN1偺3.6V_2偵愙懕偡傞
- 23斣僺儞丂P20丂壓偺夞楬恾偺CN1偺P20偵愙懕偡傞
- 24斣僺儞丂P21丂壓偺夞楬恾偺CN1偺P21偵愙懕偡傞
- 25斣僺儞丂P22丂壓偺夞楬恾偺CN1偺P22偵愙懕偡傞
- 26斣僺儞丂P23丂壓偺夞楬恾偺CN1偺P23偵愙懕偡傞
憱峴嫍棧僙儞僒偺夞楬恾
壛岺偟偨僊傾
僊傾儃僢僋僗傊偺庢傝晅偗

僼僅僩僀儞僞儔僾僞偺攝抲
儘乕僞儕僄儞僐乕僟偺弌椡
憱峴嫍棧偐傜幵懱偺埵抲傪専弌
EE_Type_LT傪巊偭偰嶌偭偨儔僀儞僩儗乕僒偺摦夋偩丅
嵍塃偺幵椫偺扨埵帪娫偁偨傝偺憱峴嫍棧偐傜丄幵懱偺曽岦偲埵抲傪寁嶼偟偰傒偨丅 偙偺摦夋偼丄憱峴傪奐巒偟偨埵抲偵栠偭偨傜掆巭偡傞傛偆僾儘僌儔儉偟偨傕偺偩丅
婳愓傪僌儔僼偵偟偰傒傞偲偙偺傛偆偵側偭偨丅乮僌儔僼偺扨埵偼儅僀僋儘儊乕僞乯
憱峴嫍棧傪應掕偡傞儘乕僞儕僄儞僐乕僟偼庤嶌傝偱暘夝擻偑15mm掱搙丄墘嶼偼屌掕彫悢揰曽幃偲偄偆忦審偩偑丄偙偺掱搙偺惛搙偼弌傞傛偆偩丅 僐乕僗偺摿挜傪婰榐偟2夞栚埲崀偺憱峴傪嵟揔壔偡傞偙偲傗柪楬扵嶕側偳偵墳梡偱偒傞丅
嵍塃偺幵椫偺扨埵帪娫偁偨傝偺憱峴嫍棧偐傜丄幵懱偺曽岦偲埵抲傪寁嶼偟偰傒偨丅 偙偺摦夋偼丄憱峴傪奐巒偟偨埵抲偵栠偭偨傜掆巭偡傞傛偆僾儘僌儔儉偟偨傕偺偩丅
婳愓傪僌儔僼偵偟偰傒傞偲偙偺傛偆偵側偭偨丅乮僌儔僼偺扨埵偼儅僀僋儘儊乕僞乯
憱峴嫍棧傪應掕偡傞儘乕僞儕僄儞僐乕僟偼庤嶌傝偱暘夝擻偑15mm掱搙丄墘嶼偼屌掕彫悢揰曽幃偲偄偆忦審偩偑丄偙偺掱搙偺惛搙偼弌傞傛偆偩丅 僐乕僗偺摿挜傪婰榐偟2夞栚埲崀偺憱峴傪嵟揔壔偡傞偙偲傗柪楬扵嶕側偳偵墳梡偱偒傞丅
僐乕僗傪妎偊偰俀廡栚埲崀懍偔埨慡偵憱峴
侾廡栚偱媫僇乕僽偺埵抲傪妎偊丄俀廡栚偲俁廡栚偼媫僇乕僽偺庤慜偱尭懍丄僇乕僽扙弌帪偵壛懍偡傞傛偆僾儘僌儔儉偟偨丅
俁廡憱傝廔傢偭偨帪揰偱巭傑傞丅
亂懍搙惂屼傪壛偊夵慞亃
PD惂屼側偳傪庢傝擖傟懍偔儔僀儞僩儗乕僗偑偱偒傞傛偆偵側傞偲丄捈慄偱僗僺乕僪偑弌傞偺偱丄捈慄偺屻偺媫僇乕僽乮L帤乯側偳偱僆乕僶乕儔儞偡傞傛偆偵側傞丅乮壓偺摦夋嶲徠乯
僆乕僶乕儔儞傪旔偗傞偨傔丄懍搙傪惂屼偟丄夵椙傪壛偊偨偺偑忋偵帵偡摦夋偩丅
亂PD惂屼偡傞傕L帤偱僆乕僶乕儔儞亃
偙偺儁乕僕偺嵟弶偵堏摦
亂懍搙惂屼傪壛偊夵慞亃
PD惂屼側偳傪庢傝擖傟懍偔儔僀儞僩儗乕僗偑偱偒傞傛偆偵側傞偲丄捈慄偱僗僺乕僪偑弌傞偺偱丄捈慄偺屻偺媫僇乕僽乮L帤乯側偳偱僆乕僶乕儔儞偡傞傛偆偵側傞丅乮壓偺摦夋嶲徠乯
僆乕僶乕儔儞傪旔偗傞偨傔丄懍搙傪惂屼偟丄夵椙傪壛偊偨偺偑忋偵帵偡摦夋偩丅
亂PD惂屼偡傞傕L帤偱僆乕僶乕儔儞亃
偙偺儁乕僕偺嵟弶偵堏摦
億乕僞僽儖僎乕儉婡
僪僢僩儅僩儕僢僋僗LED偲廐寧揹巕偺AKI-H8/3052F傪棙梡偟偰億乕僞僽儖僎乕儉婡偺惢嶌偵挧愴偟偰傒偨丅
僪僢僩儅僩儕僢僋僗LED偱拞娫怓傪昞帵偡傞丅LiPo傪揹尮偵巊偭偰僐儞僷僋僩偵傑偲傔傞丅偲偄偭偨壽戣傪夝偒偮偮丄愄夰偐偟偄僽儘僢僋曵偟傪嶌偭偨丅
僪僢僩儅僩儕僢僋僗LED偱拞娫怓傪昞帵偡傞丅LiPo傪揹尮偵巊偭偰僐儞僷僋僩偵傑偲傔傞丅偲偄偭偨壽戣傪夝偒偮偮丄愄夰偐偟偄僽儘僢僋曵偟傪嶌偭偨丅
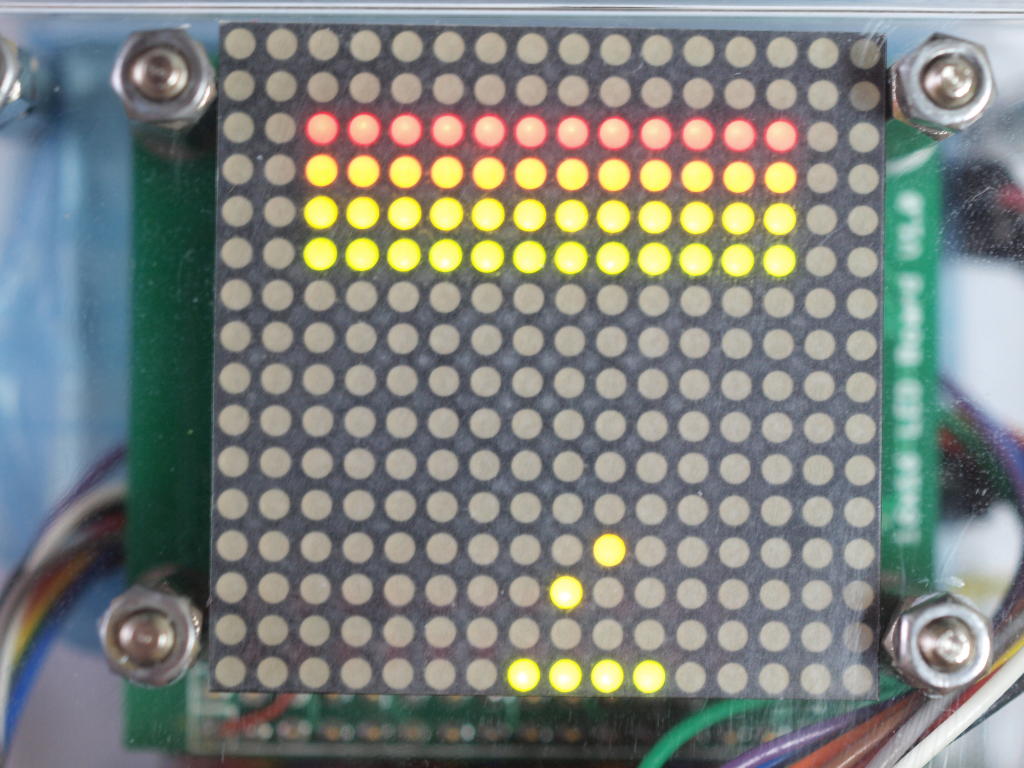

僽儘僢僋曵偟
夋柺壓偵愒偄LED偺僑乕僗僩偑塮偭偰偄傞丅偙傟偼丄婎斅僗儁乕僗偺搒崌忋D-FF(74HC273)傪侾偮偟偐偗側偐偭偨偨傔丄愒偺忋埵8Bit偺僨乕僞傪儔僢僠偝偣傞傑偱偺娫偺悢100ns偺娫偺僨乕僞偑昞帵偝傟偰偟傑偆傕偺偩丅僴乕僪僂僄傾傪愝寁偡傞帪揰偱偼丄偆偭偡傜偲偼昞帵偝傟傞壜擻惈偼偁傞偲偼峫偊偰偄偨偑丄偙偙傑偱偼偭偒傝偲尒偊傞偲偼巚傢側偐偭偨丅
壓婰偺夞楬恾偼丄僑乕僗僩偑弌側偄傛偆夵慞嵪傒丅
16亊16僪僢僩LED昞帵丂僨儌
夞楬恾
亂慡懱亃
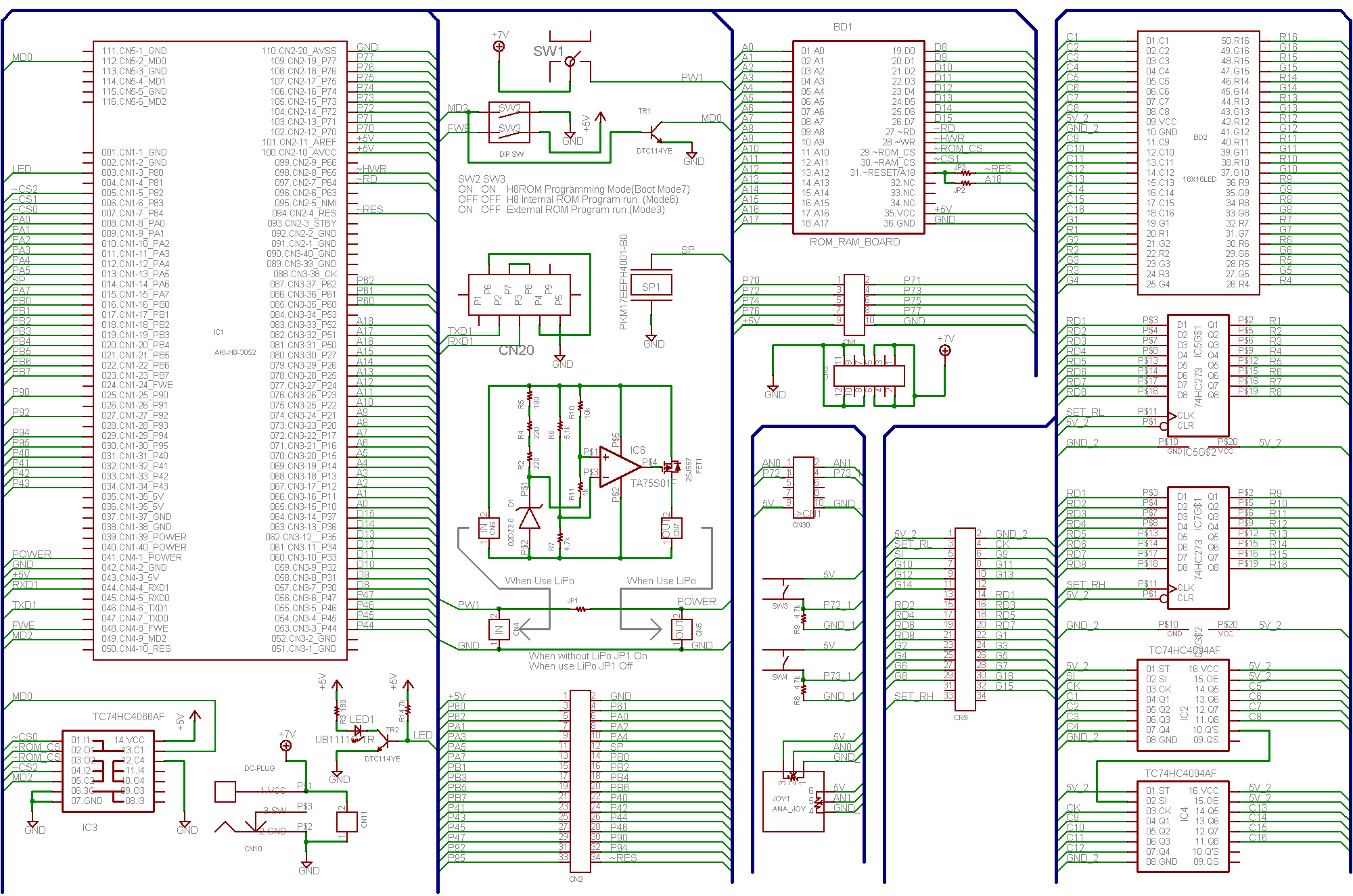
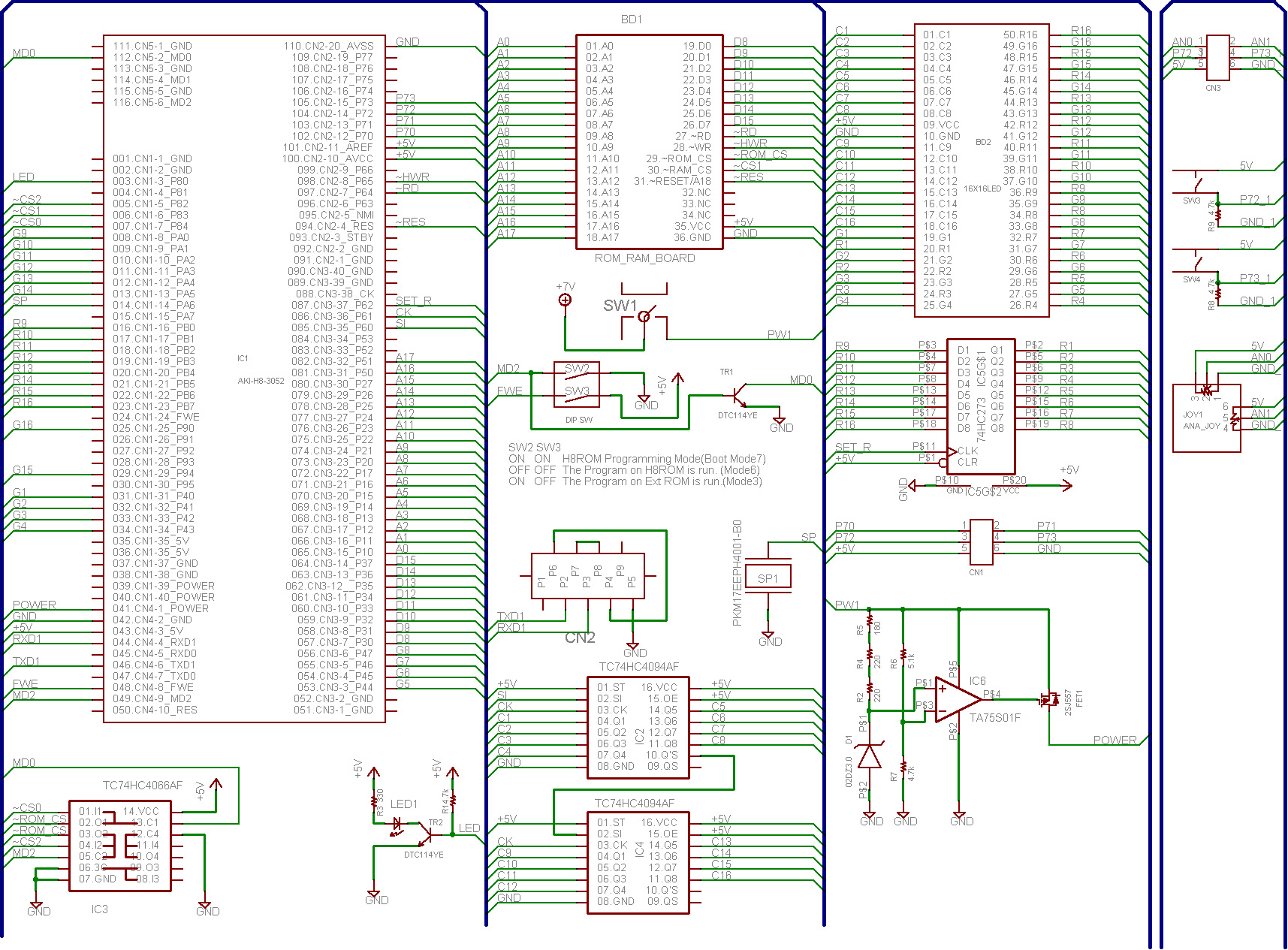 仼僑乕僗僩斉
仼僑乕僗僩斉
亂16亊16LED儃乕僪乮BD2)亃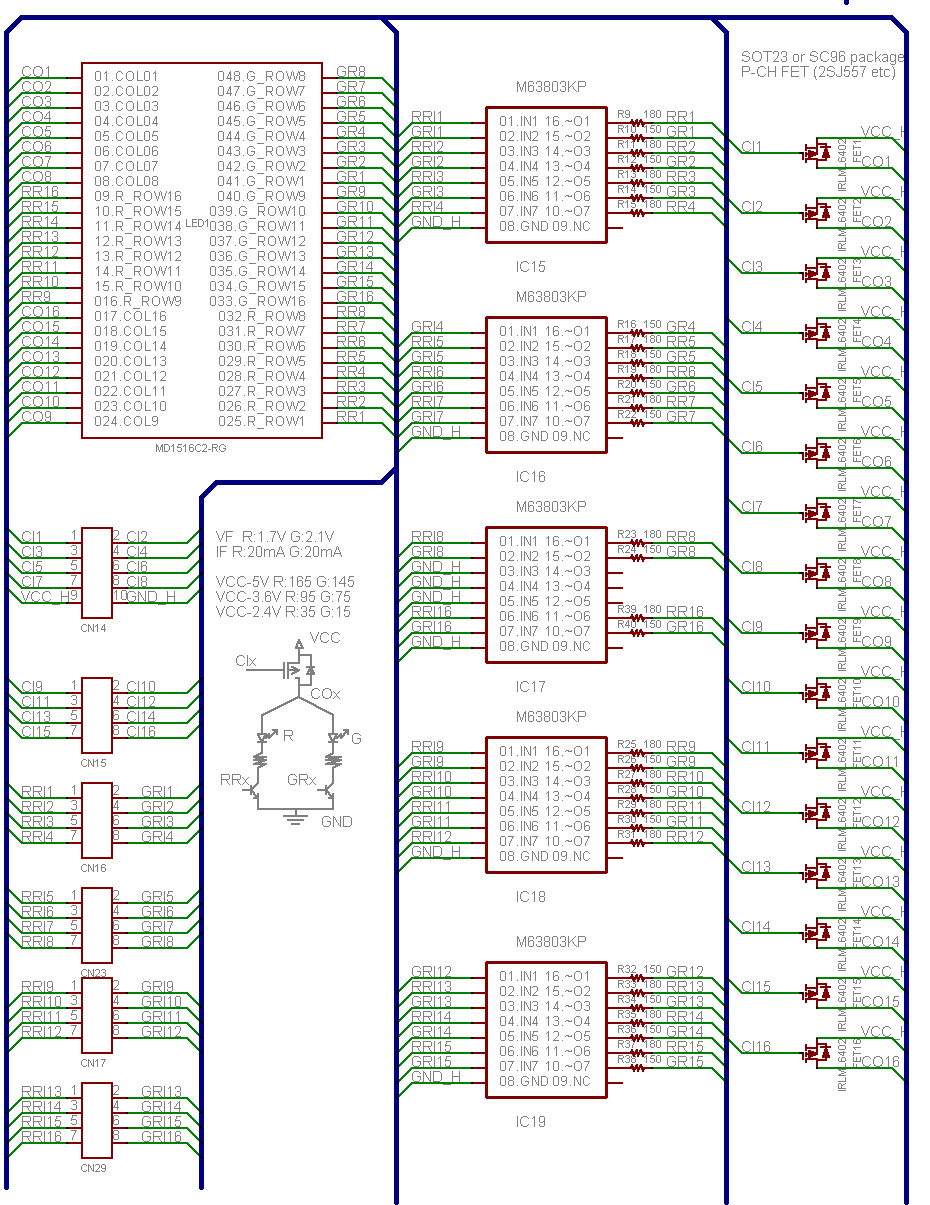
仸丂幚憰帪偵偼丄P-CH FET偼BSS84偵丄椢LED梡偺LED偼150兌偐傜43兌偵曄峏偟偨丅乮椢LED偺掞峈偑戝偒偄偲丄墿怓傪昞帵偡傞偺偑崲擄偵側傞乯
亂ROM丒RAM儃乕僪乮BD1乯亃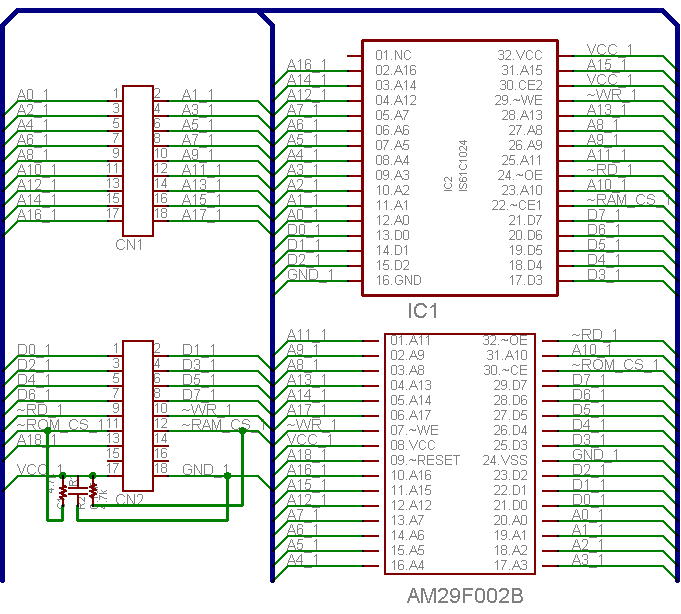
仼僑乕僗僩斉
亂16亊16LED儃乕僪乮BD2)亃
仸丂幚憰帪偵偼丄P-CH FET偼BSS84偵丄椢LED梡偺LED偼150兌偐傜43兌偵曄峏偟偨丅乮椢LED偺掞峈偑戝偒偄偲丄墿怓傪昞帵偡傞偺偑崲擄偵側傞乯
亂ROM丒RAM儃乕僪乮BD1乯亃
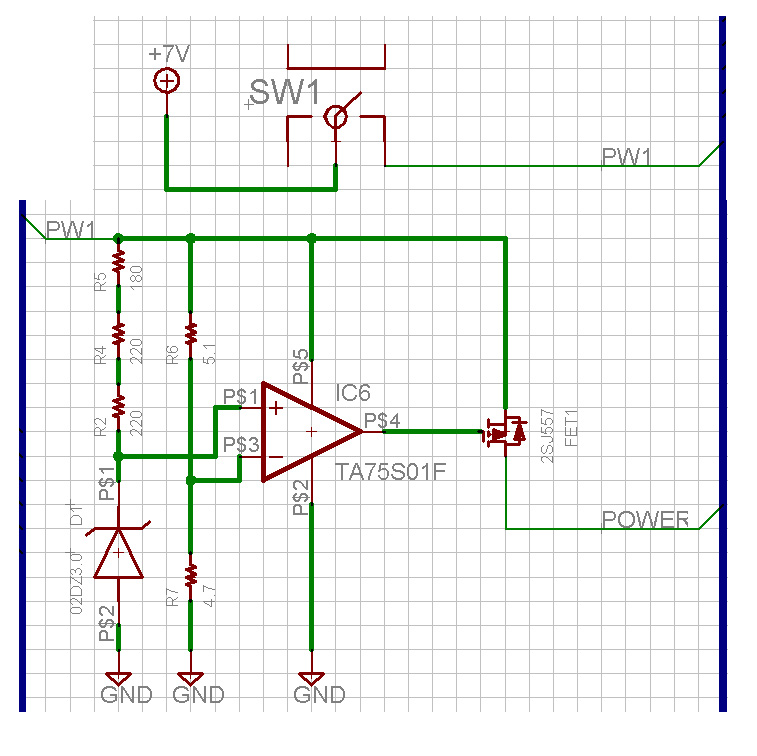
亂夁曻揹杊巭夞楬亃
LiPo傪揹尮偵巊偭偨偨傔丄夁曻揹杊巭夞楬傪愝寁偟偨丅
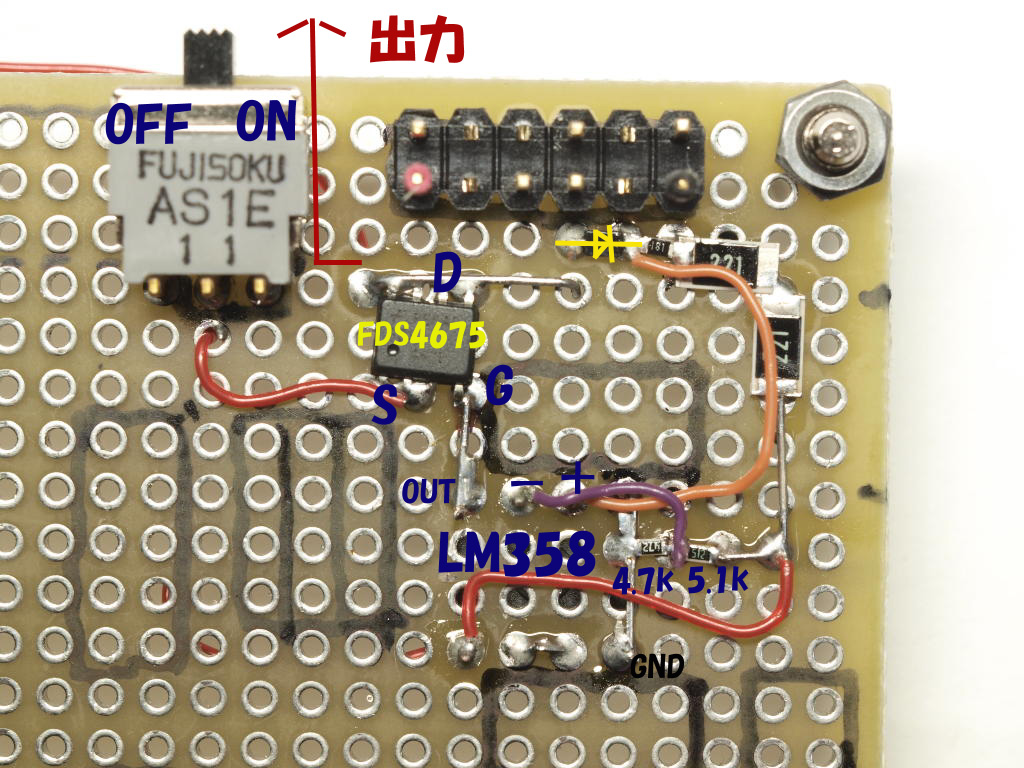
埲壓偵丄偦偺晹暘偩偗敳偒弌偟偨幚尡夞楬偵偮偄偰傑偲傔傞丅
僗僀僢僠傪擖傟傞偲8V掱搙偑嫙媼偝傟傞偙偲傪妋擣偟偨丅
OP傾儞僾偵偼LM358傪丄P-CH FET偵偼FDS4675傪巊偭偨丅
FDS4675偼丄S-G娫偺揹埑偑2.2V傛傝彫偝偄偲OFF偡傞丅
LiPo偺揹埑偑6.2V傪壓夞傞偁偨傝偱丄乮僣僃僫乕僟僀僆乕僪偵傛傝3V偵曐偨傟偰偄傞乯OP傾儞僾偺+抂巕偺揹埑傪-抂巕偺揹埑偑壓夞傞丅
LM358偺弌椡偼亄懁偺嵟戝偱偁傞4.3V掱搙乮VCC偺70%偲壖掕乯偲側傝丄S-G娫偺揹埑偑1.9V偲側傞偺偱丄FET偼OFF偡傞丅
埲壓偵丄偦偺晹暘偩偗敳偒弌偟偨幚尡夞楬偵偮偄偰傑偲傔傞丅
僗僀僢僠傪擖傟傞偲8V掱搙偑嫙媼偝傟傞偙偲傪妋擣偟偨丅
OP傾儞僾偵偼LM358傪丄P-CH FET偵偼FDS4675傪巊偭偨丅
FDS4675偼丄S-G娫偺揹埑偑2.2V傛傝彫偝偄偲OFF偡傞丅
LiPo偺揹埑偑6.2V傪壓夞傞偁偨傝偱丄乮僣僃僫乕僟僀僆乕僪偵傛傝3V偵曐偨傟偰偄傞乯OP傾儞僾偺+抂巕偺揹埑傪-抂巕偺揹埑偑壓夞傞丅
LM358偺弌椡偼亄懁偺嵟戝偱偁傞4.3V掱搙乮VCC偺70%偲壖掕乯偲側傝丄S-G娫偺揹埑偑1.9V偲側傞偺偱丄FET偼OFF偡傞丅
晹昳攝抲
僜僼僩僂僄傾
亂僋儔僗恾亃
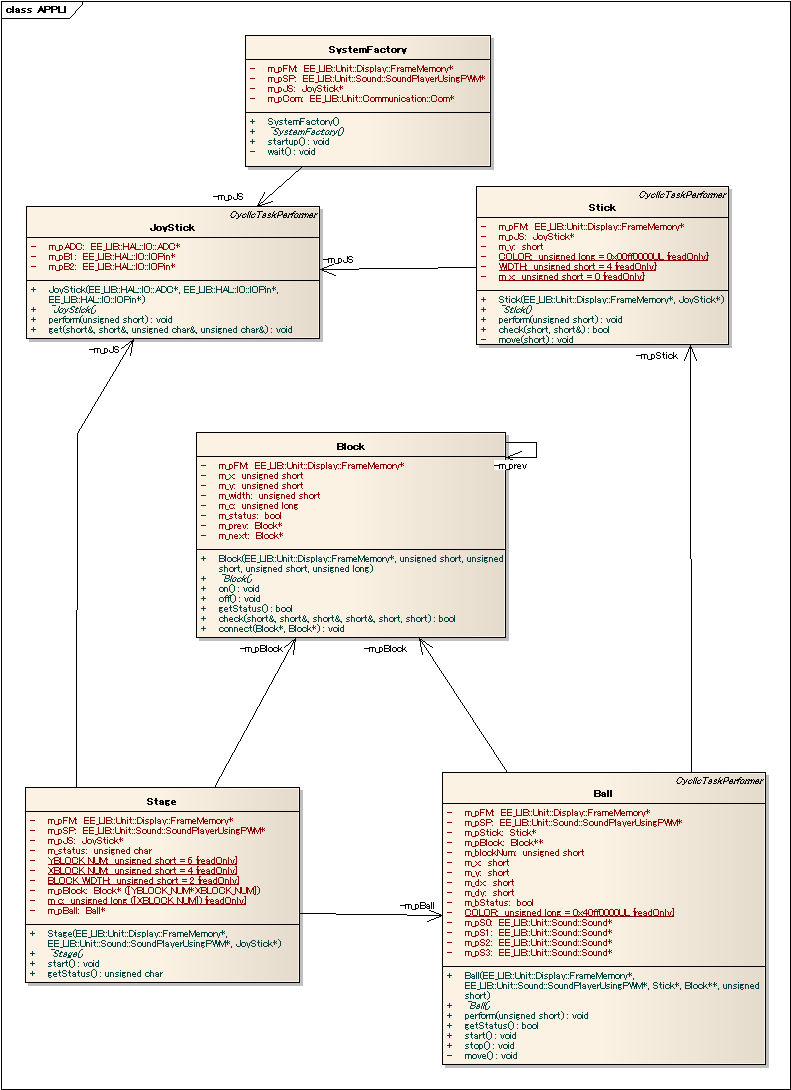
Block乮僽儘僢僋乯丄Ball乮嬍乯丄Stick乮儐乕僓偑憖嶌偡傞朹乯丄Game偺柺傪昞偡Stage僋儔僗丄儐乕僓偺擖椡傪揱偊傞JoyStick僋儔僗丄僋儔僗偺惗惉傪偍偙側偆SystemFactory僋儔僗傪僋儔僗偲偟偰拪弌偟偨丅
偙偺僋儔僗恾偱偼丄傾僾儕働乕僔儑儞僪儊僀儞偺傒昞尰偟偰偄傞丅
亂僔乕働儞僗恾晽丂怳傞晳偄恾亃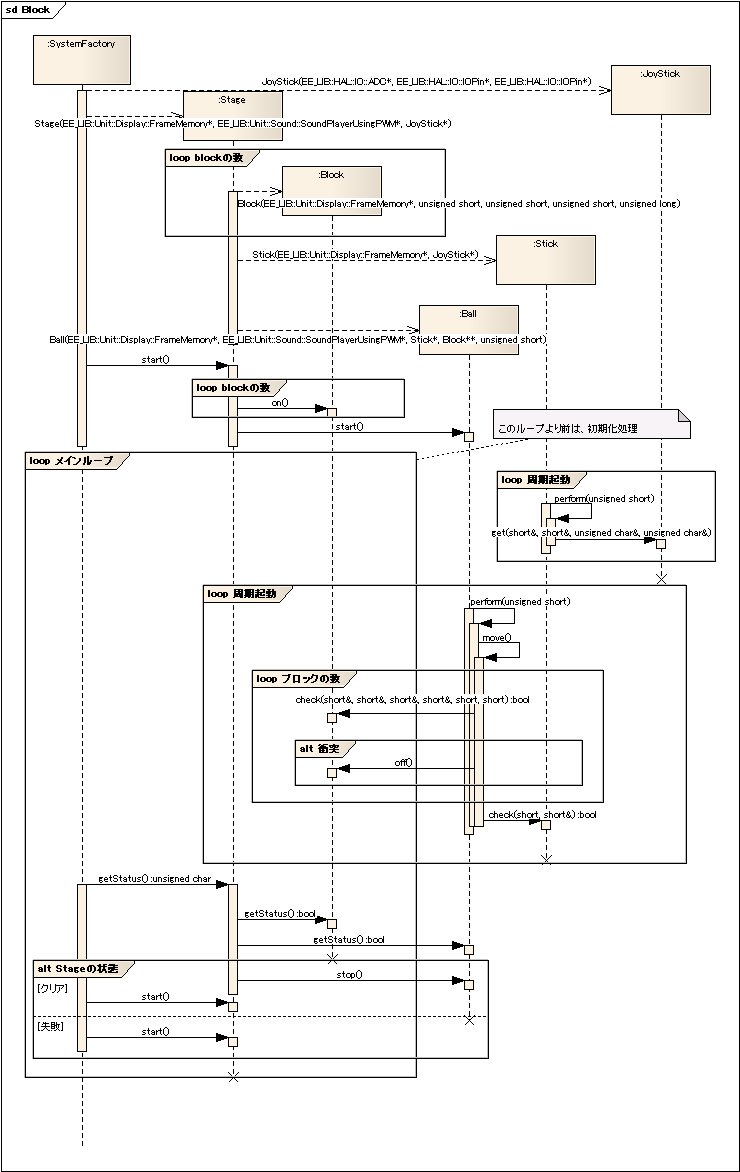
偙偺恾偼丄僋儔僗娫偺娭楢傪僔乕働儞僗恾偺婰崋傪巊偭偰傑偲傔偨傕偺偩丅UML偺寛傑傝偵増偭偨傕偺偱偼側偄丅埲壓偵丄娙扨偵棳傟傪愢柧偡傞丅
Stick僋儔僗丄Ball僋儔僗偼廃婜僞僗僋偩丅perform偲偄偆儊僜僢僪偑妱傝崬傒偵傛傝廃婜揑偵屇傃弌偝傟傞丅
Stick僋儔僗偼丄JoyStick偺忬懺偵偟偨偑偭偰丄Stick傪堏摦偡傞
Ball僋儔僗偼丄夋柺偺拞傪堏摦偟丄暻傗Stick傗Block偵偁偨傞偲挼偹曉傞丅Block偵偁偨傞偲Block偺Off儊僜僢僪傪屇傃弌偟偰Block傪攋夡偡傞丅Stick偵偁偨傜偢偵夋柺偺奜偵旘傃弌偡偲丄Status偑Fault忬懺偵側傞丅
儊僀儞儖乕僾偱偼丄Stage僋儔僗偺忬懺傪忢偵娔帇偟偰偄傞丅
Stage僋儔僗偺忬懺偼丄Ball偑Fault偡傞偲幐攕丄Block偑偡傋偰夡傟傞偲僋儕傾偲側傞丅
Stage僋儔僗偺忬懺偑丄幐攕傑偨偼僋儕傾偵側傞偲丄Stage僋儔僗偺Start儊僜僢僪傪屇傃弌偟偰怴偟偄Stage傪奐巒偡傞丅
Block乮僽儘僢僋乯丄Ball乮嬍乯丄Stick乮儐乕僓偑憖嶌偡傞朹乯丄Game偺柺傪昞偡Stage僋儔僗丄儐乕僓偺擖椡傪揱偊傞JoyStick僋儔僗丄僋儔僗偺惗惉傪偍偙側偆SystemFactory僋儔僗傪僋儔僗偲偟偰拪弌偟偨丅
偙偺僋儔僗恾偱偼丄傾僾儕働乕僔儑儞僪儊僀儞偺傒昞尰偟偰偄傞丅
亂僔乕働儞僗恾晽丂怳傞晳偄恾亃
偙偺恾偼丄僋儔僗娫偺娭楢傪僔乕働儞僗恾偺婰崋傪巊偭偰傑偲傔偨傕偺偩丅UML偺寛傑傝偵増偭偨傕偺偱偼側偄丅埲壓偵丄娙扨偵棳傟傪愢柧偡傞丅
Stick僋儔僗丄Ball僋儔僗偼廃婜僞僗僋偩丅perform偲偄偆儊僜僢僪偑妱傝崬傒偵傛傝廃婜揑偵屇傃弌偝傟傞丅
Stick僋儔僗偼丄JoyStick偺忬懺偵偟偨偑偭偰丄Stick傪堏摦偡傞
Ball僋儔僗偼丄夋柺偺拞傪堏摦偟丄暻傗Stick傗Block偵偁偨傞偲挼偹曉傞丅Block偵偁偨傞偲Block偺Off儊僜僢僪傪屇傃弌偟偰Block傪攋夡偡傞丅Stick偵偁偨傜偢偵夋柺偺奜偵旘傃弌偡偲丄Status偑Fault忬懺偵側傞丅
儊僀儞儖乕僾偱偼丄Stage僋儔僗偺忬懺傪忢偵娔帇偟偰偄傞丅
Stage僋儔僗偺忬懺偼丄Ball偑Fault偡傞偲幐攕丄Block偑偡傋偰夡傟傞偲僋儕傾偲側傞丅
Stage僋儔僗偺忬懺偑丄幐攕傑偨偼僋儕傾偵側傞偲丄Stage僋儔僗偺Start儊僜僢僪傪屇傃弌偟偰怴偟偄Stage傪奐巒偡傞丅
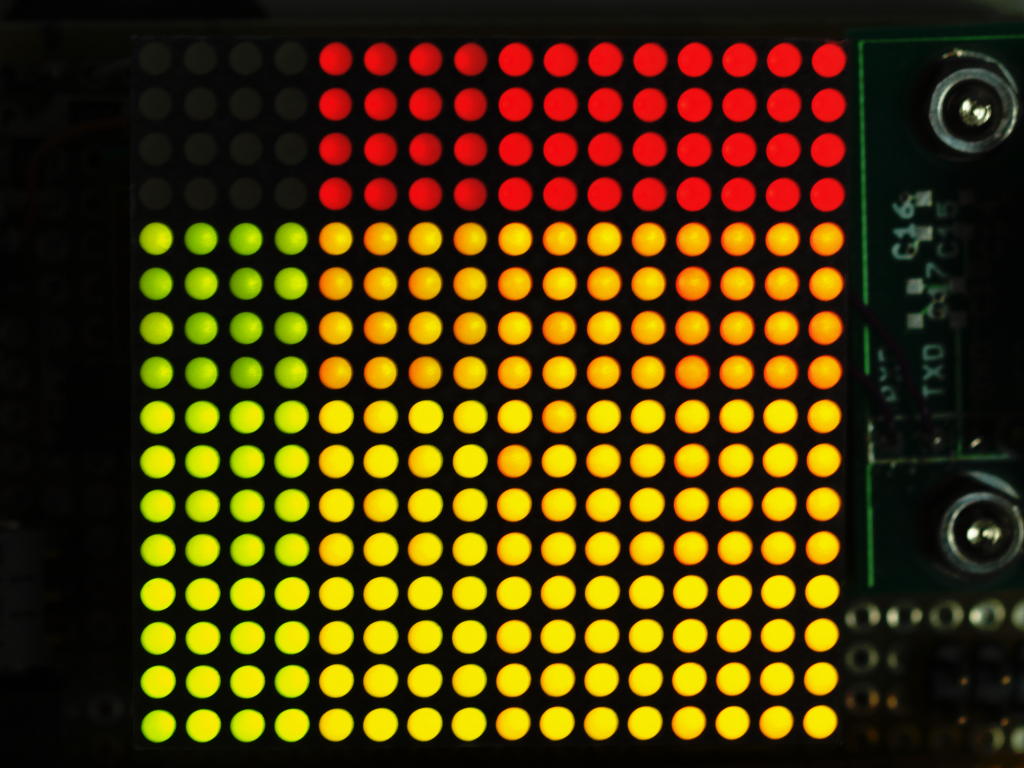
亂僪僢僩儅僩儕僢僋僗LED丂拞娫怓昞帵亃
椢愒偦傟偧傟4奒挷偺慻傒崌傢偣偱16怓昞帵傪幚尰偟偨丅
200us偛偲偵侾峴昞帵偟丄1.6ms偱侾枃偺夋憸傪昞帵偡傞丅
2枃偺夋憸傪偦傟偧傟1.6ms偲3.2ms偱昞帵偡傞偲丄偦偺慻傒崌傢偣偵傛傝椢偲愒偦傟偧傟偱4奒挷傪昞尰偱偒傞丅(昞帵帪娫丗0ms,1.6ms,3.2ms,4.8ms偺係抜奒)
200us偛偲偵侾峴昞帵偟丄1.6ms偱侾枃偺夋憸傪昞帵偡傞丅
2枃偺夋憸傪偦傟偧傟1.6ms偲3.2ms偱昞帵偡傞偲丄偦偺慻傒崌傢偣偵傛傝椢偲愒偦傟偧傟偱4奒挷傪昞尰偱偒傞丅(昞帵帪娫丗0ms,1.6ms,3.2ms,4.8ms偺係抜奒)