Simply
仕様
- CPU・・・・H8S/2128 20MHz×2
- 電源電圧・・・・12V
- 画面・・・・224×184dot 白黒NTSC
- サウンド・・・・beep 2チャンネル
外部環境に依存しないスタンドアローン型の手軽なマイコンにしたい。(未完成)
回路図
部品配置
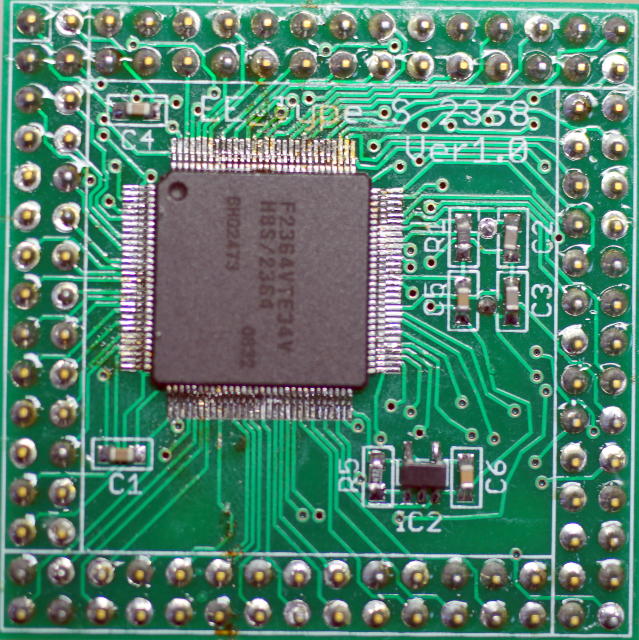
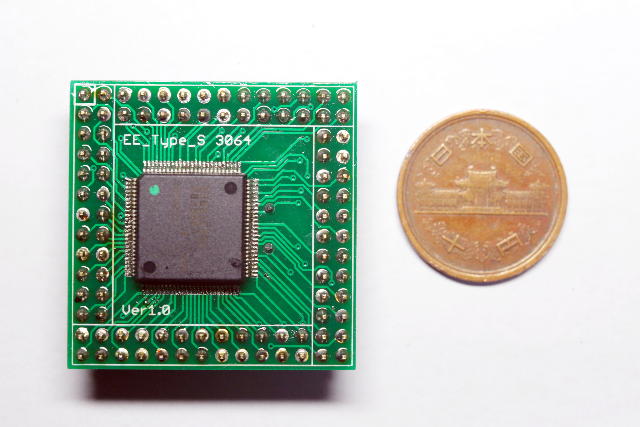
EE_Type_S/2368
仕様
- CPU・・・・H8S/2364 33.8688MHz
- 電源電圧・・・・3.3V
- RAM(内蔵)・・・・32k Byte
- ROM(内蔵)・・・・384k Byte
- サイズ・・・・42mm×42mm
CPUにH8S 2000コアのH8S/2364 CPUを採用したワンチップマイコン。
電源を接続するだけで、シングルチップアドバンスモード(モード7)で起動するように設計した。
初めて0.4mmピッチのCPUに挑戦した。
CPUのほとんどのピンを2.54mmピッチのピンヘッダに引き出してあるので、さまざまな拡張が可能だ。
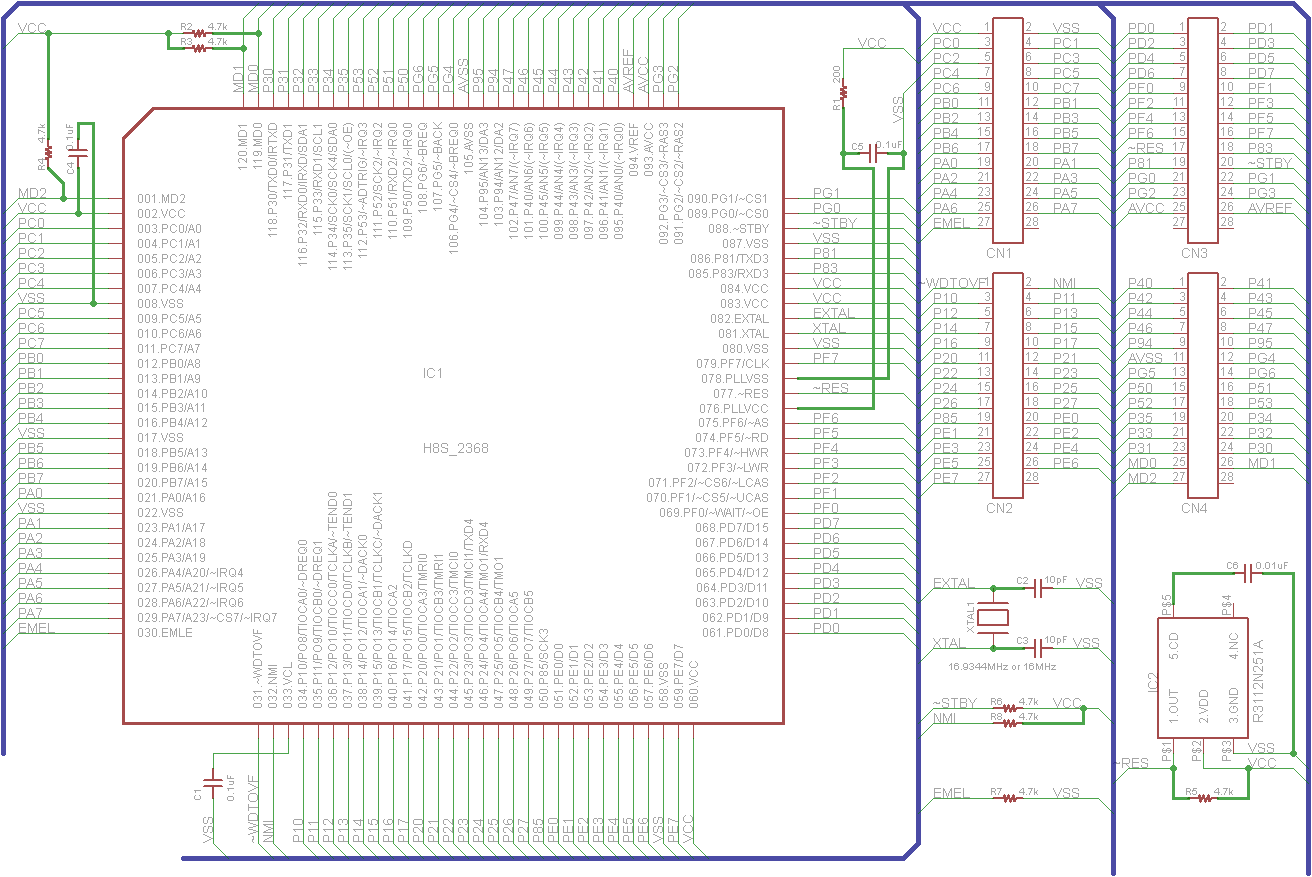
回路図
部品配置


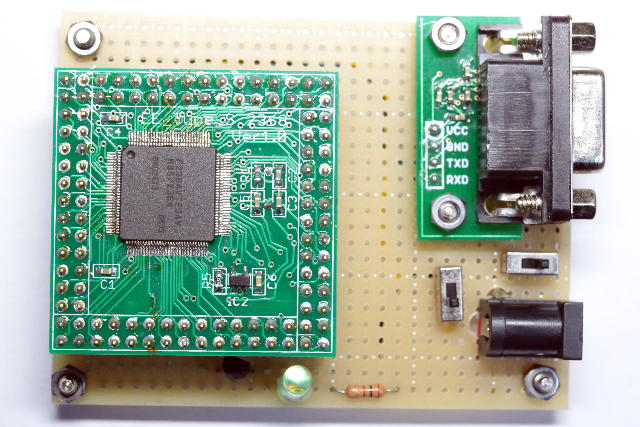
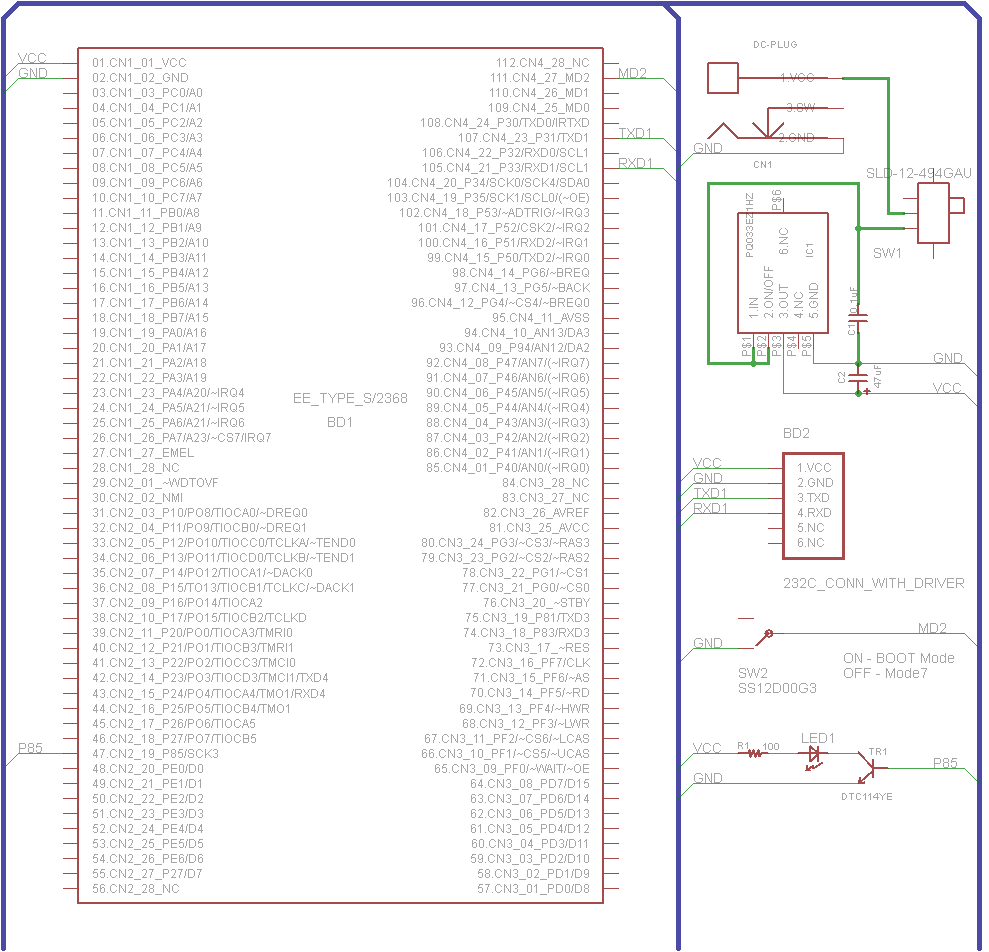
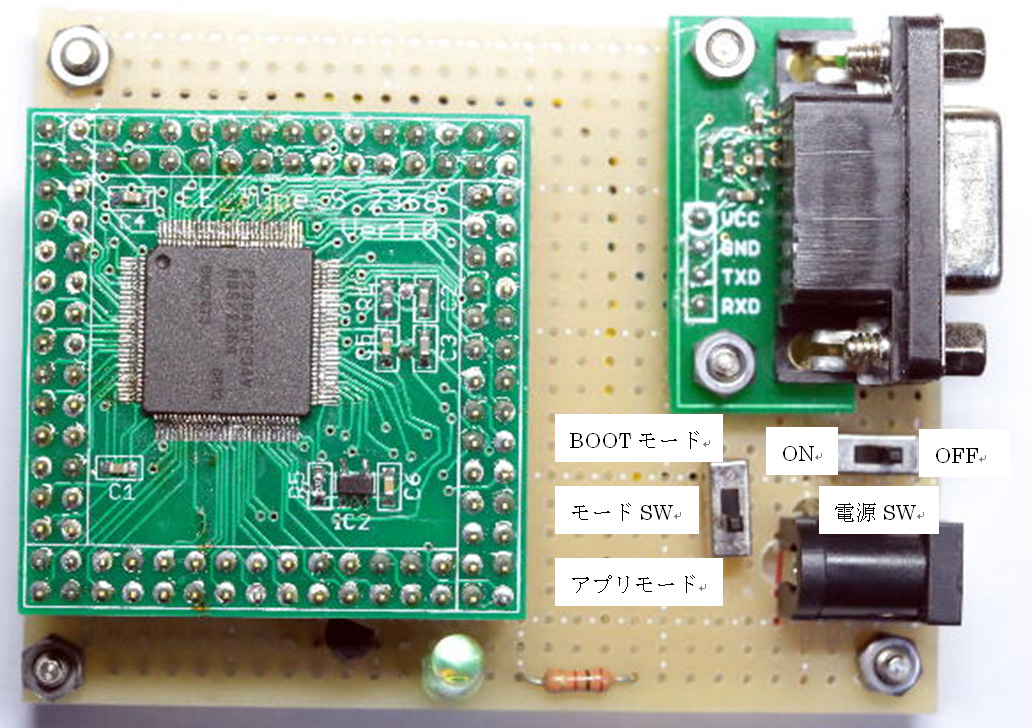
マザーボード
BootモードとMode7をSW2で切り替える。
LEDをP85に接続した。
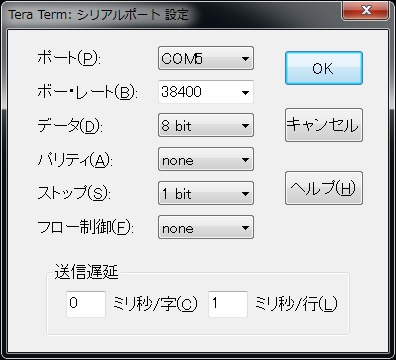
※ TeraTermのボーレートは、57600 BPS
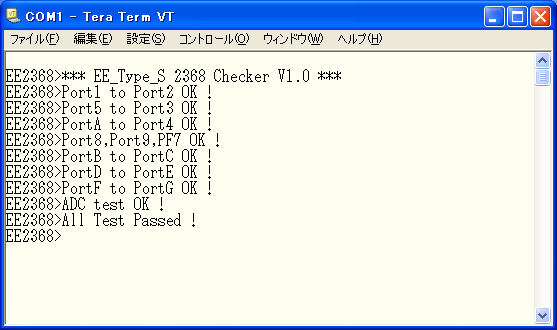
検査方法
- モードスイッチをBOOTモードにして、電源を入れる。
- セルフチェックプログラムをロードする。
- モードスイッチをアプリモードにして、電源を入れる。
- TeraTerm上にテスト結果を確認する。
セルフチェックプログラムのロードには、FDTを使用する。
「デバイスとカーネルの選択」のダイアログで「Generic BOOT Device」、「デバイス設定」のダイアログの入力クロックに16.9344 メインクロックの逓倍比に2を入力する。
※ TeraTermのボーレートは、57600 BPS
セルフチェックプログラム
セルフチェックプログラムソース
このページの最初に移動
EE_Type_S/3064
仕様
- CPU・・・・H8/3064 25MHz
- 電源電圧・・・・5V
- RAM(内蔵)・・・・8k Byte
- ROM(内蔵)・・・・256k Byte
- サイズ・・・・37mm×37mm
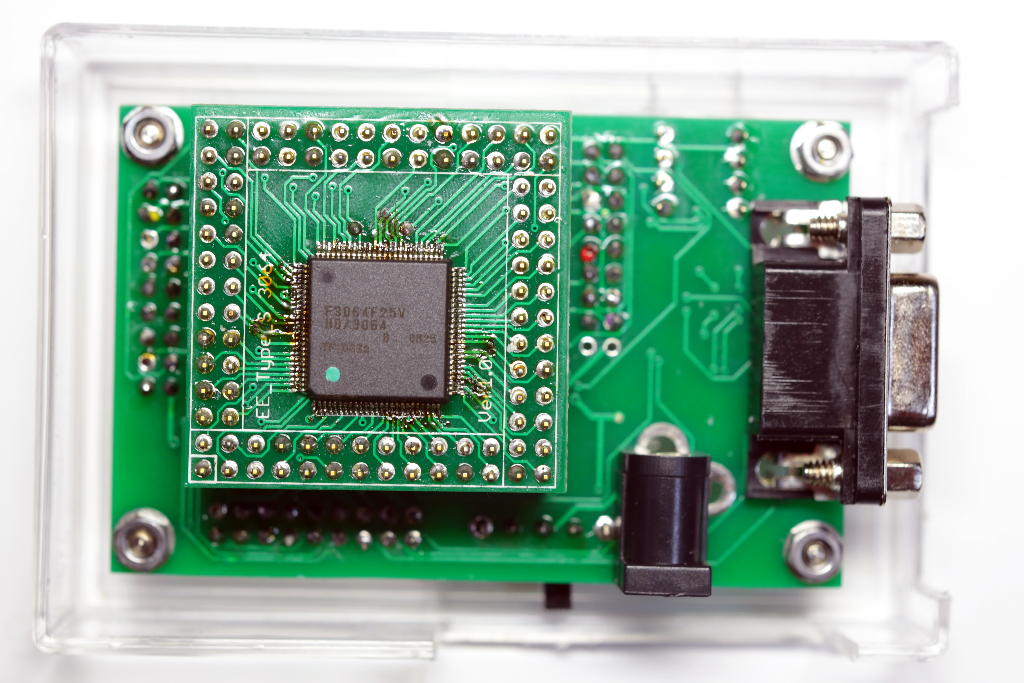
CPUにH8/300H CPUを採用したワンチップマイコン。
電源を接続するだけで、シングルチップアドバンスモード(モード7)で起動するように設計した。
CPUのほとんどのピンを2.54mmピッチのピンヘッダに引き出してあるので、さまざまな拡張が可能だ。
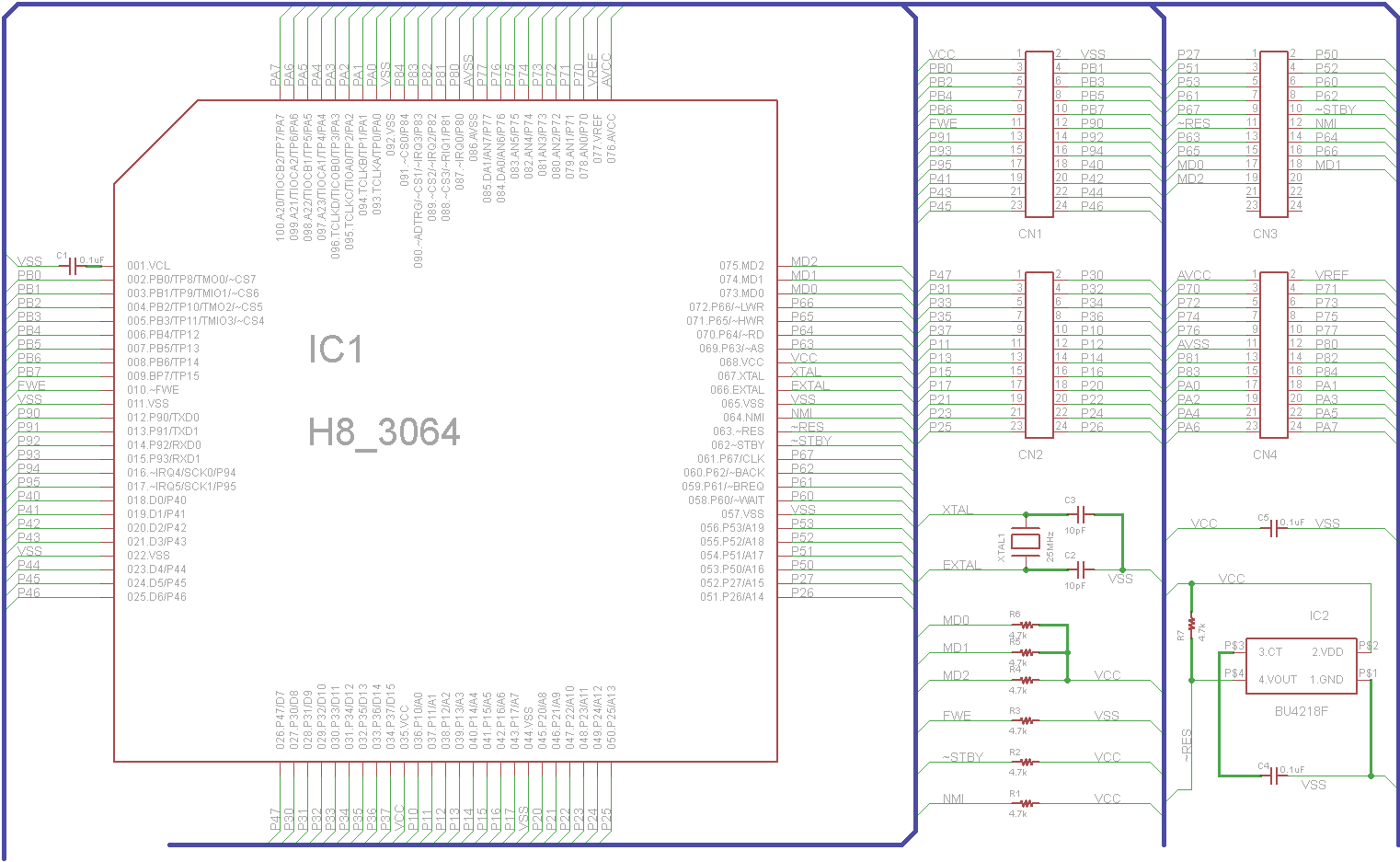
回路図
部品配置
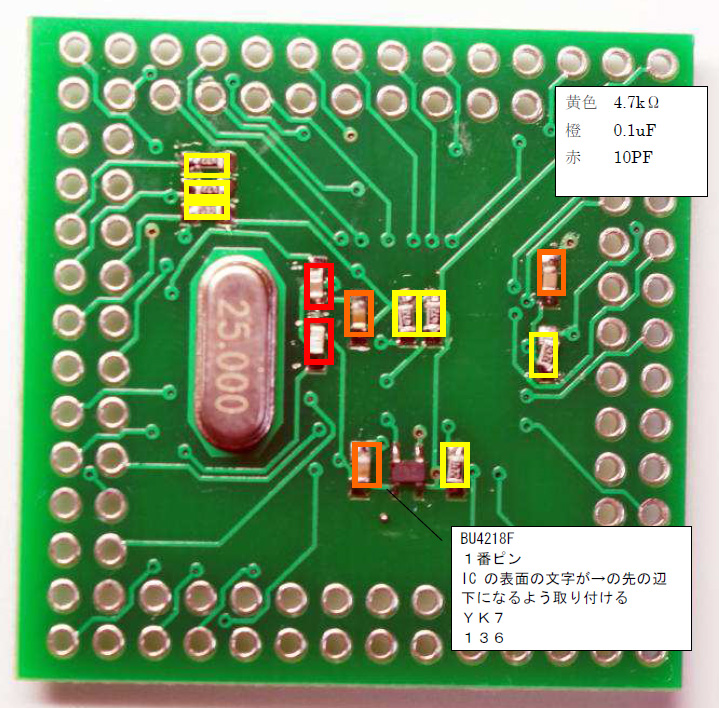
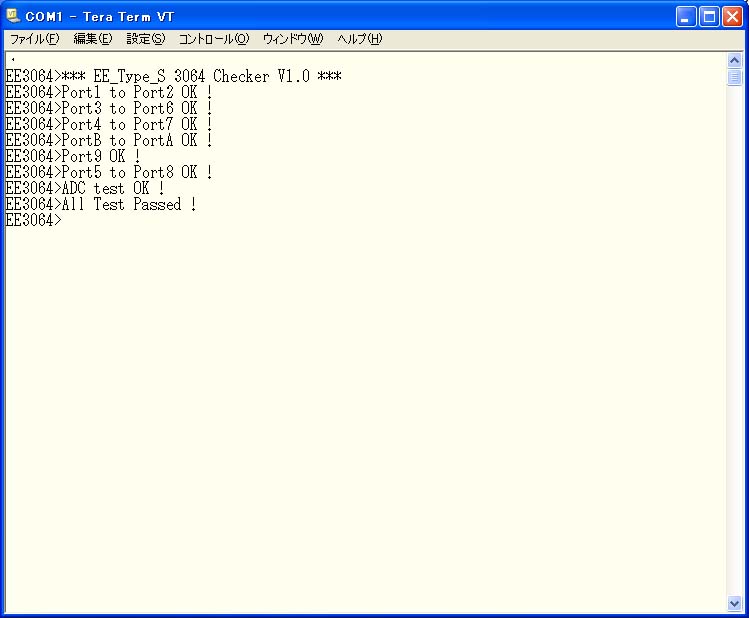
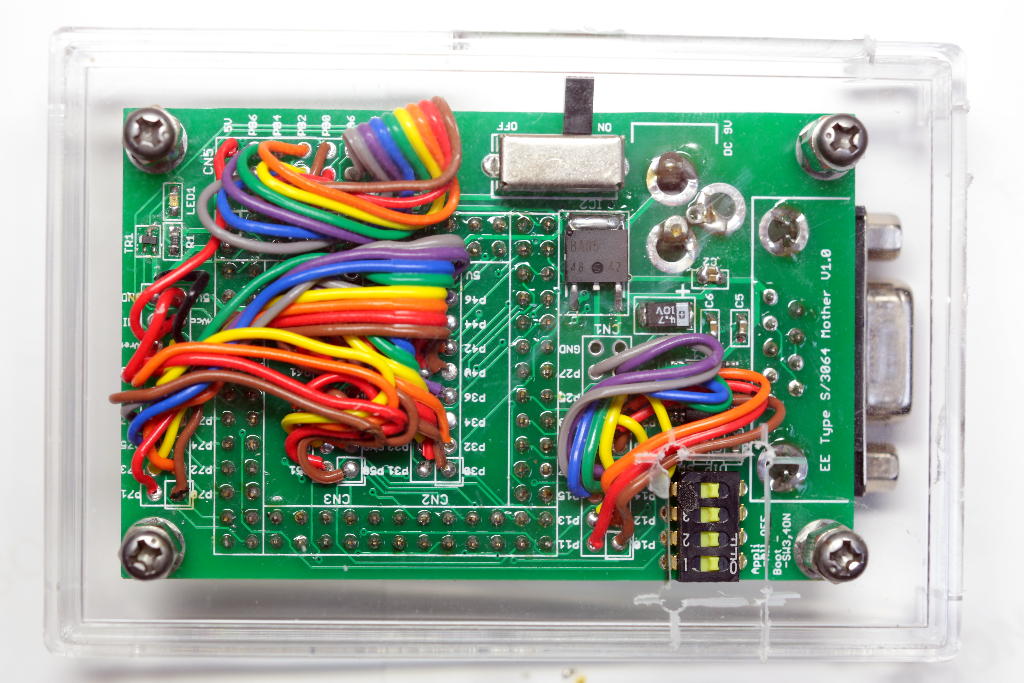
検査方法
- 裏面のDIPスイッチのSW3,4(内側の2つのスイッチ)をONにする。
- セルフチェックプログラムをロードする。
- SW3,4をOFFにして電源を入れる。
- TeraTerm上にテスト結果を確認する。
セルフチェックプログラム
セルフチェックプログラムソース
このページの最初に移動
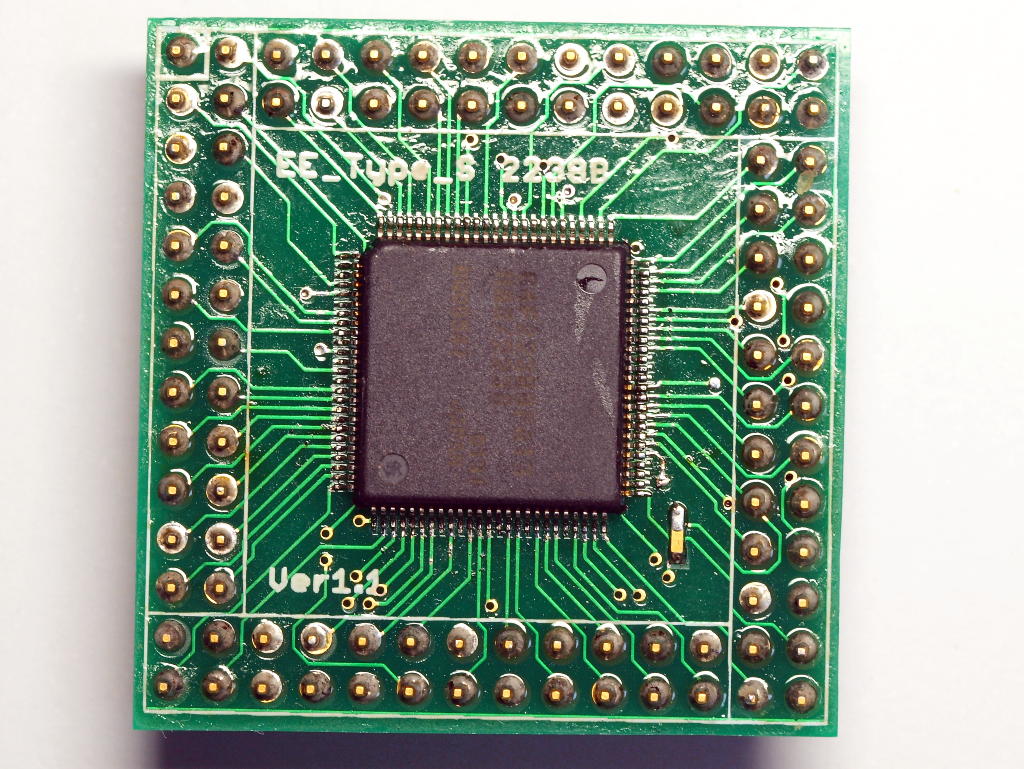
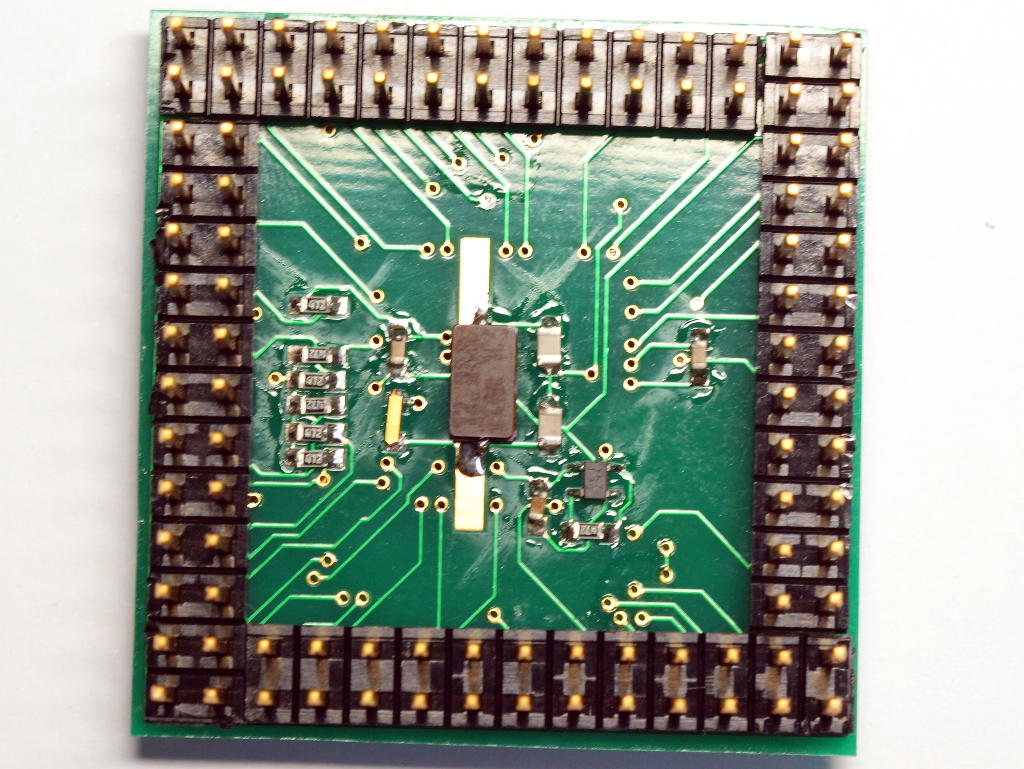
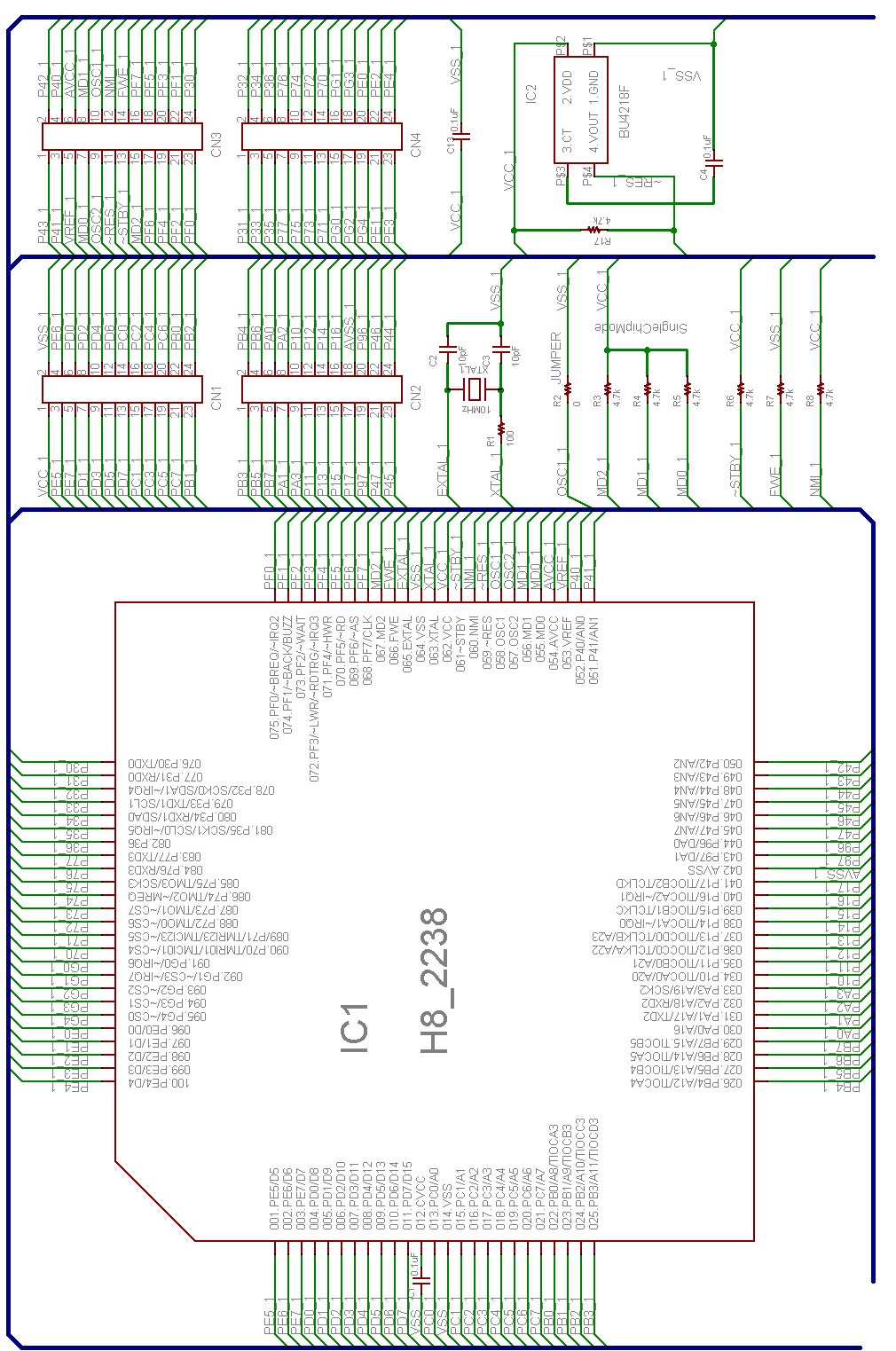
EE_Type_S/2238
仕様
- CPU・・・・H8S/2238B 12.288MHz
- 電源電圧・・・・3〜5.5V
- RAM(内蔵)・・・・16k Byte
- ROM(内蔵)・・・・256k Byte
- サイズ・・・・37mm×37mm
CPUにH8S/2000コアのH8S/2238Bを採用したワンチップマイコン。
電源を接続するだけで、シングルチップアドバンスモード(モード7)で起動するように設計した。
CPUのほとんどのピンを2.54mmピッチのピンヘッダに引き出してあるので、さまざまな拡張が可能だ。
内部電源降圧回路を内蔵しているので、3〜5.5Vの範囲で動作する。電池(3本直列)での駆動も可能だ。
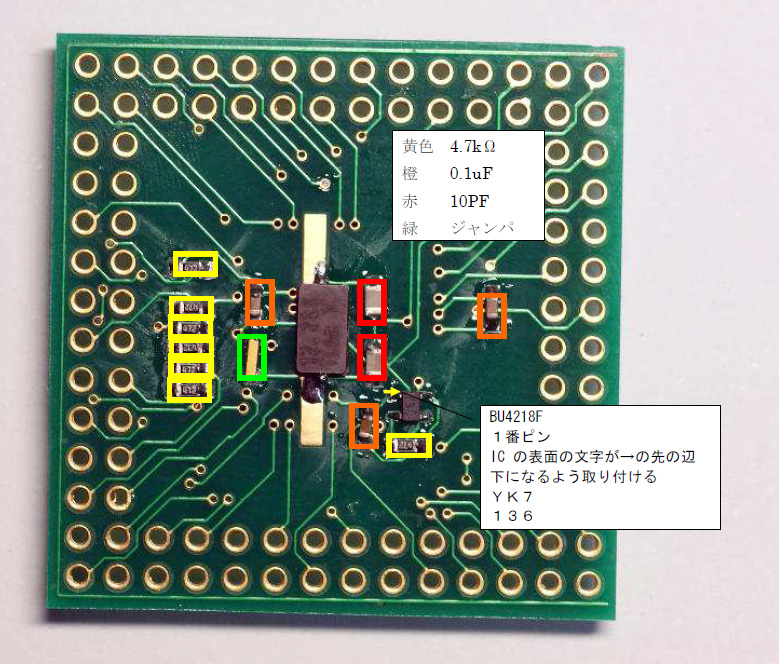
回路図
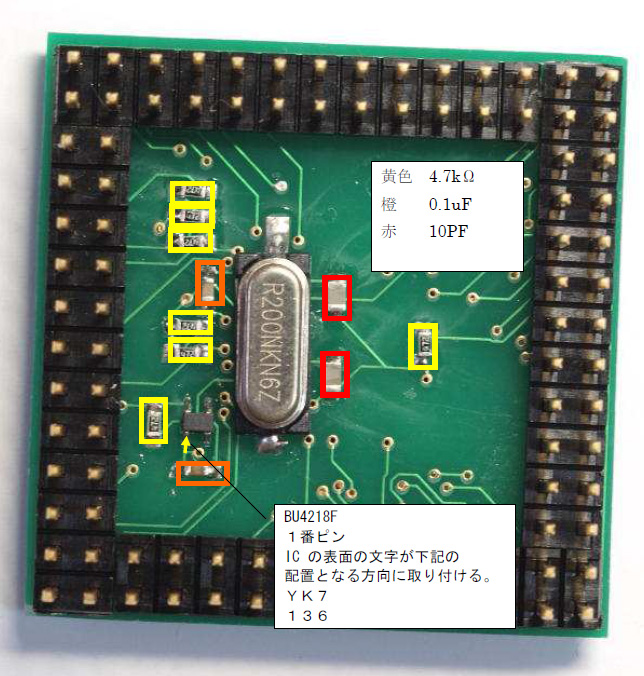
部品配置
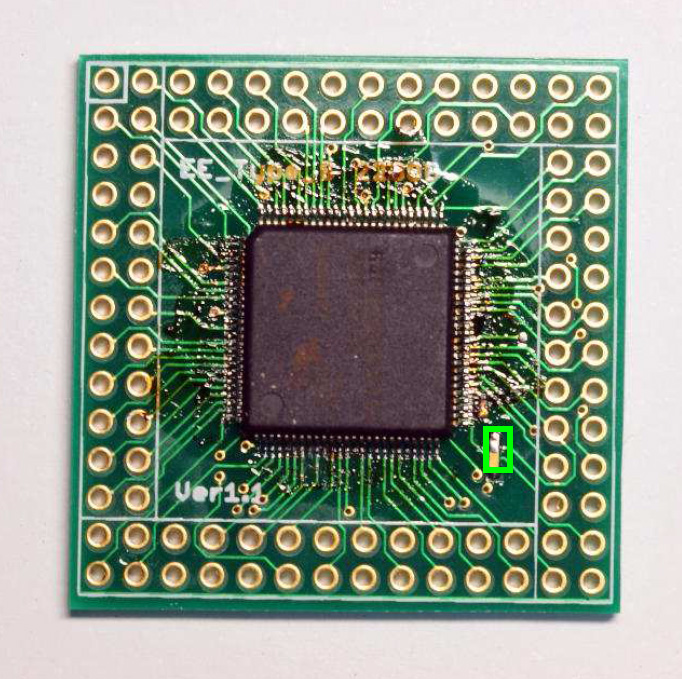
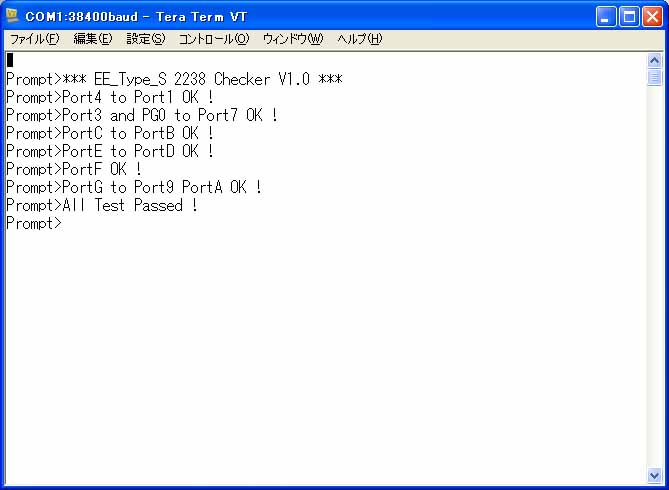
検査方法
- DIP SWのSW1をBOOTモードにする。
- セルフチェックプログラムをロードする。
- DIP SWのSW1をAPPLIモードにして、電源を入れる。
- TeraTerm上にテスト結果を確認する。
セルフチェックプログラム
セルフチェックプログラムソース
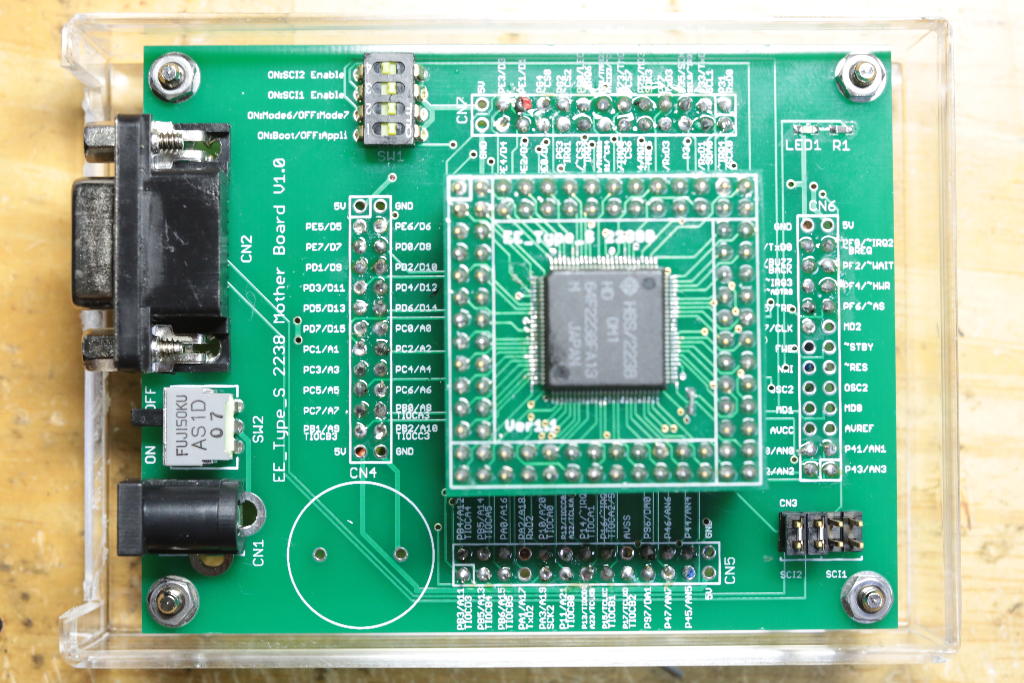
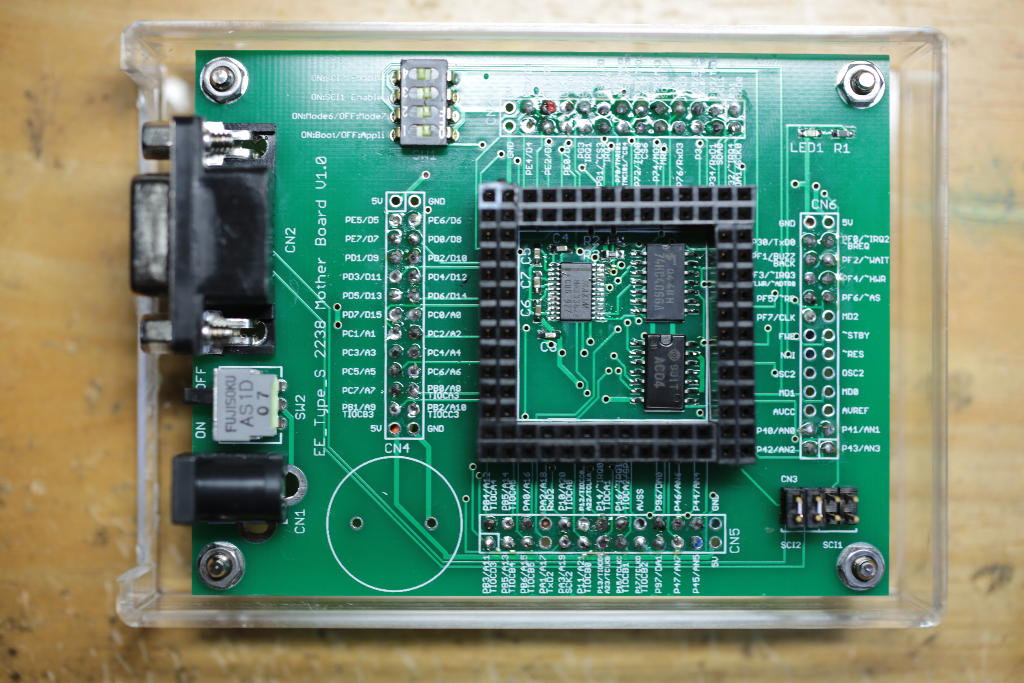
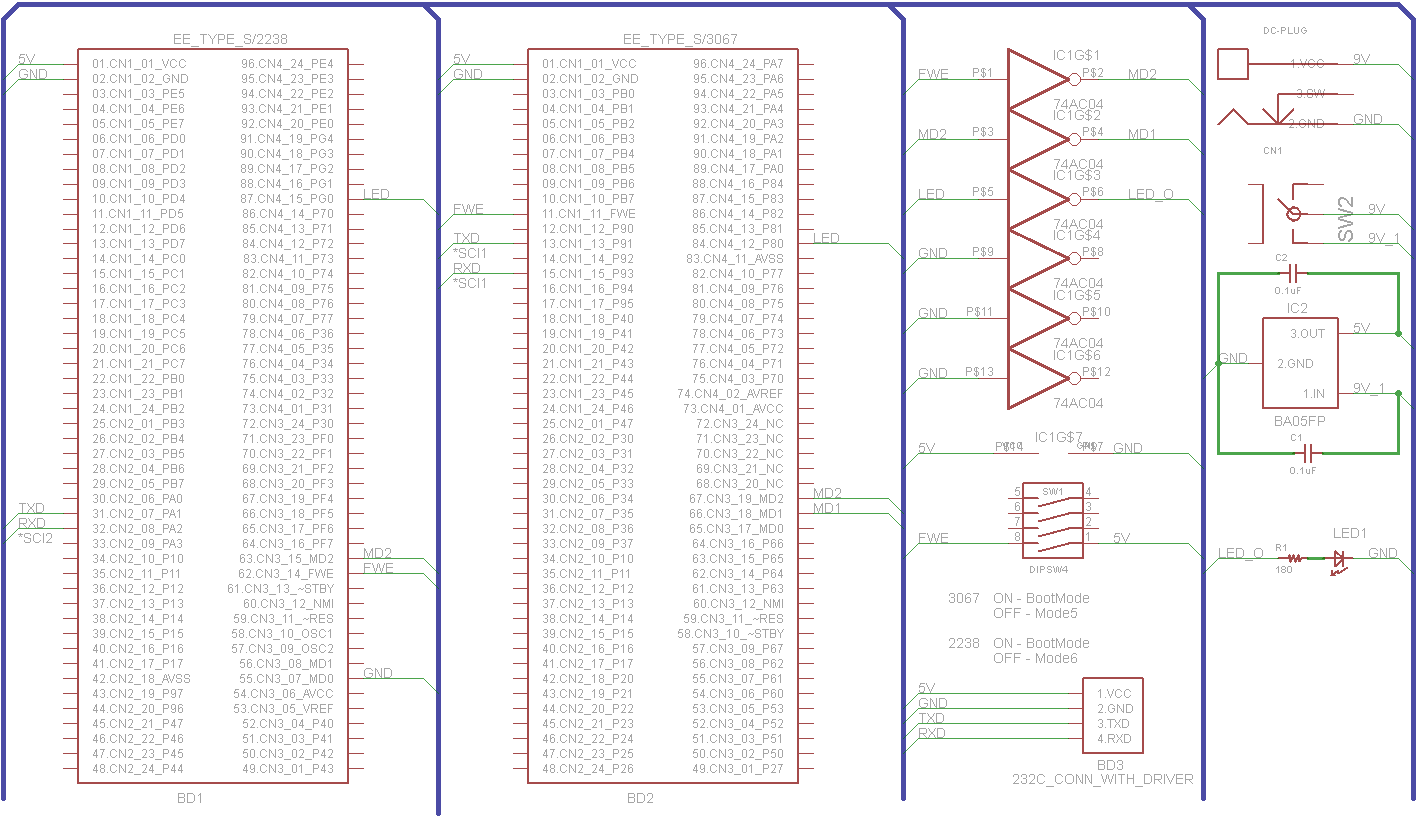
マザーボード
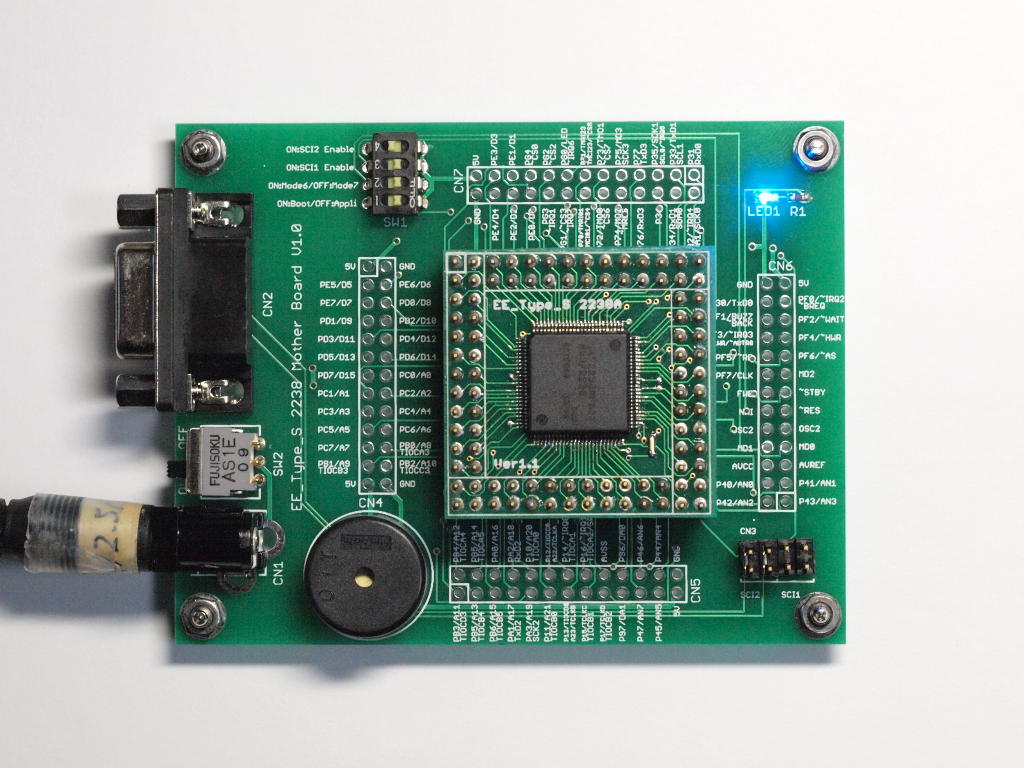
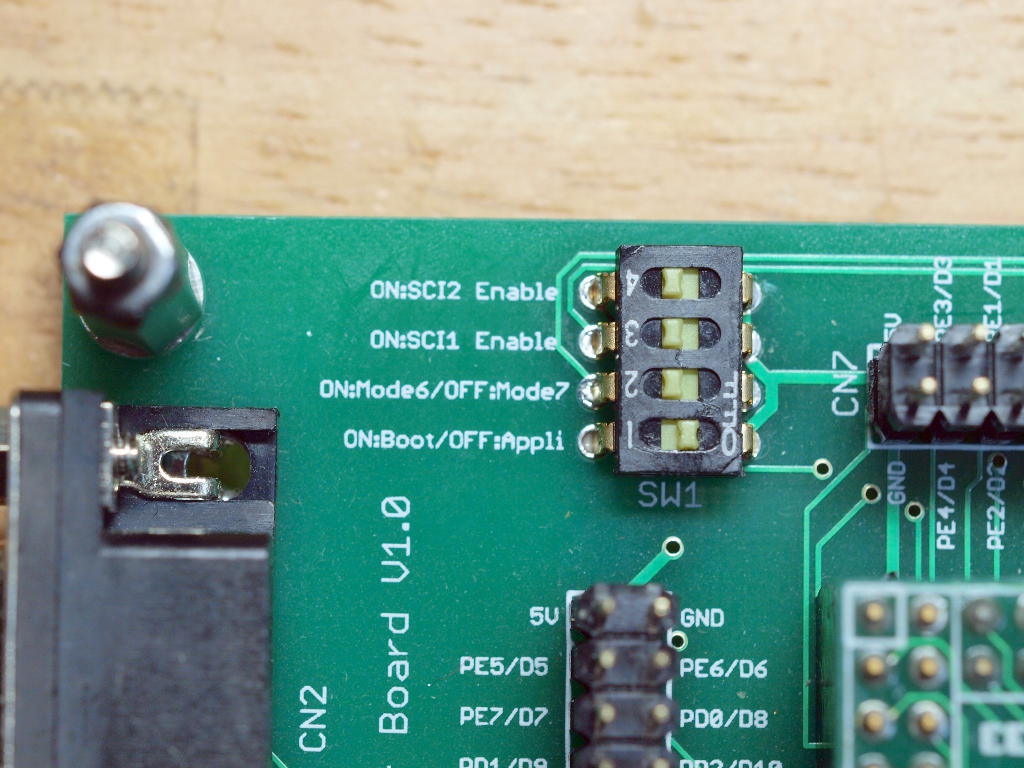
- SW1
- ON・・・・Bootモード
- OFF・・・・アプリモード
- SW2
- ON・・・・モード6
- OFF・・・・モード7
- SW3
- ON・・・・SCI1有効
- OFF・・・・SCI1無効
- SW4
- ON・・・・SCI2有効
- OFF・・・・SCI2無効
RS232Cレベル変換ICのSCI1(またはSCI2)用の端子とDSUB9Pinコネクタの接続を切り替える。
SCI1やSCI2がディップスイッチで有効になっていることが前提。
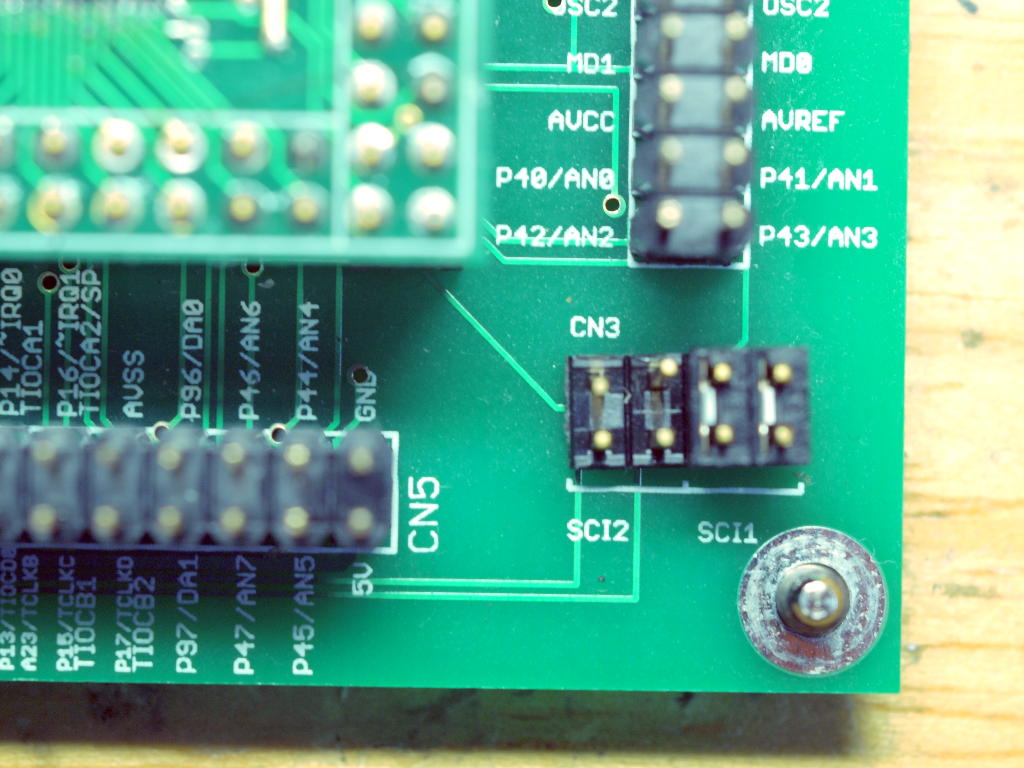
メモリーを拡張するとSCI2とバスが重なるので、SCI1を利用する。
写真は、SCI1を利用した場合のDIP SWとCN3の設定を示している。

BOOTモードではSCI2を使ってプログラムの書き込む。写真は、SCI2を利用する時のDIP SWとCN3の設定を示している。

回路図

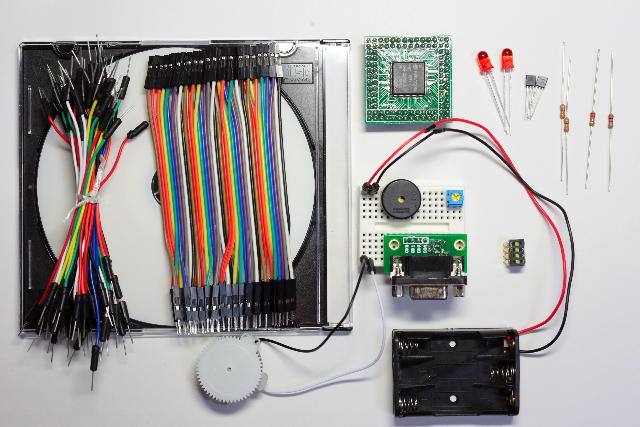
スターターキット
マニュアルのダウンロード
このページの最初に移動
EE_Type_S/3067
仕様
- CPU・・・・H8/3067 20MHz
- 電源電圧・・・・5V
- RAM(内蔵)・・・・4 Byte
- ROM(内蔵)・・・・128k Byte
- サイズ・・・・37mm×37mm
CPUにH8/300H CPUを採用したワンチップマイコン。
電源を接続するだけで、シングルチップアドバンスモード(モード7)で起動するように設計した。
CPUのほとんどのピンを2.54mmピッチのピンヘッダに引き出してあるので、さまざまな拡張が可能だ。このCPUは、8MbyteまでのDRAMを接続できる。

回路図

部品配置
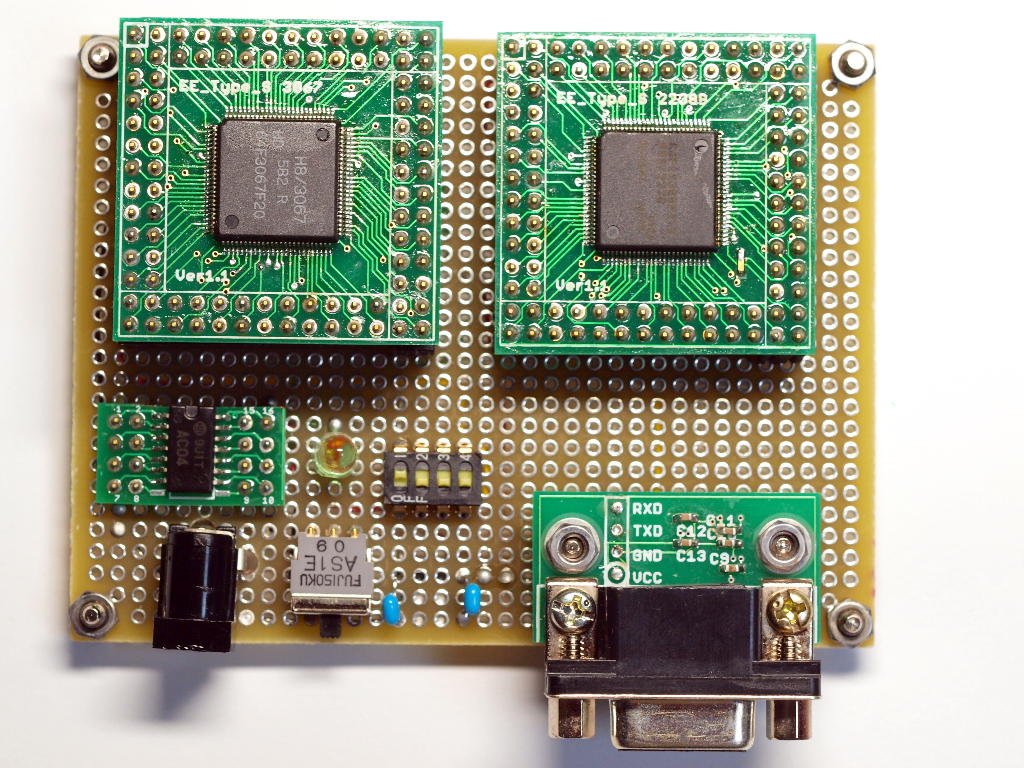
マザーボード
【使い方】
- EE_Type_S3067かEE_Type_S2238のどちらかをセットする。
(両方差し込むと起動しない) - DIPスイッチをONにして電源をいれる。(Bootモードで起動する)
- プログラムを書き込む。
(H83067はH8WriteTurbo,H8S2238はFDTを使う)
※FDTのパラメータはCPUクロック12.288以外はすべてデフォルト - 一旦電源を切って、DIPスイッチをOFFにして電源を入れる/li>
- 書き込んだプログラムが起動する
回路図
このページの最初に移動
H8S/2128関連
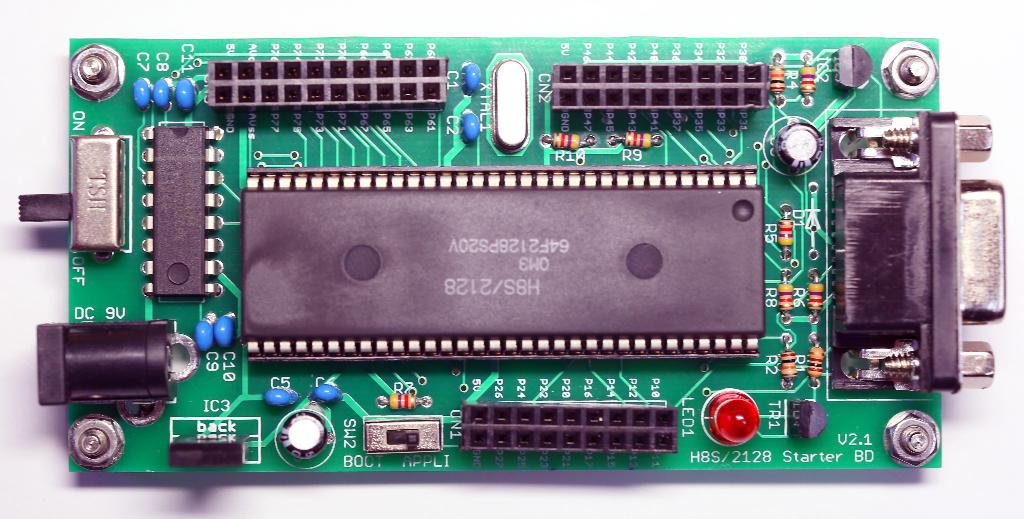
H8S/2128 starter board
仕様
- CPU・・・・H8S/2128 20MHz
- 電源電圧・・・・5V
- RAM(内蔵)・・・・4k Byte
- ROM(内蔵)・・・・128k Byte
- サイズ・・・・49mm×100mm
CPUにH8S 2000コアのH8S/2128 CPUを採用したワンチップマイコン。
SW2でシングルチップアドバンスモード(モード2)とブートモードを選択できるよう設計した。
このCPUは、入手性のよいH8系CPUの中では数少ないSDIP型のCPUだ。
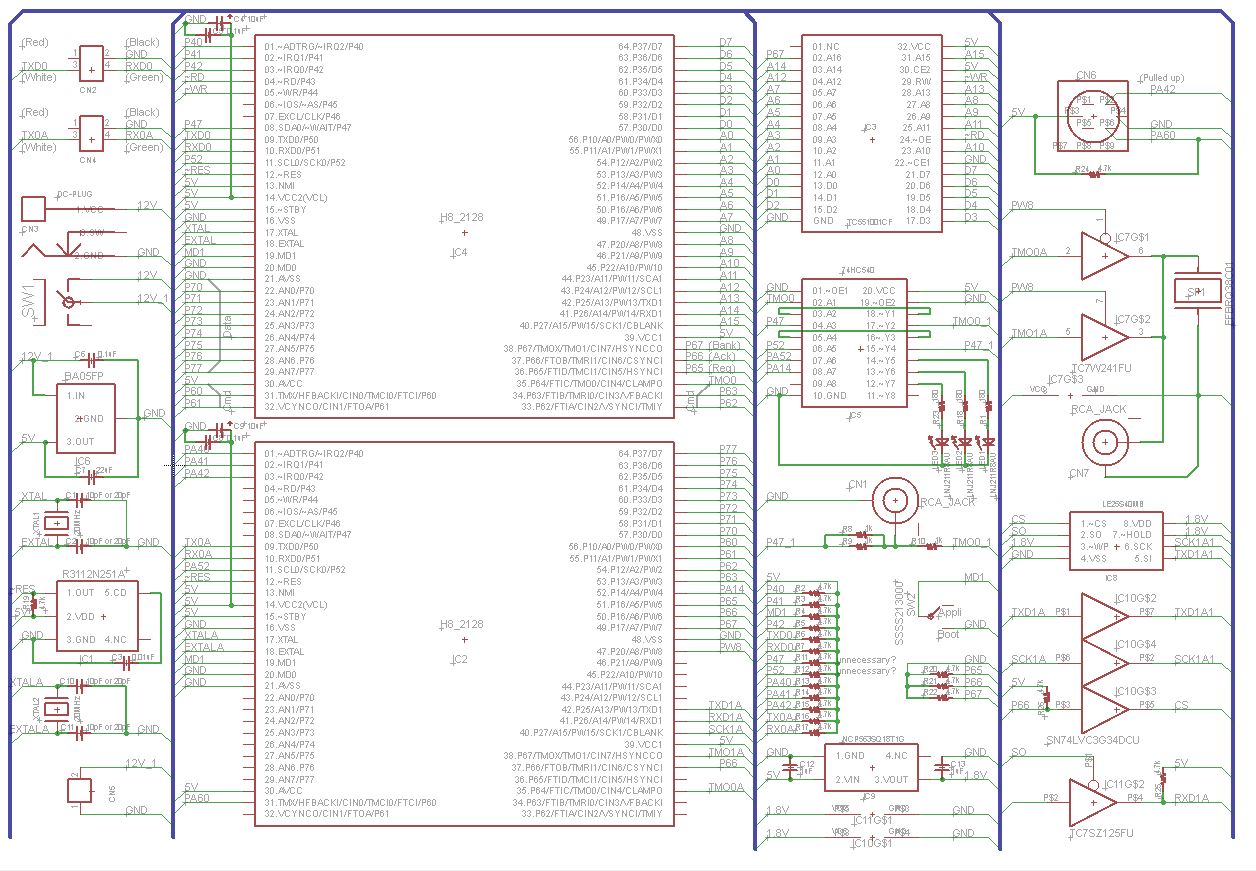
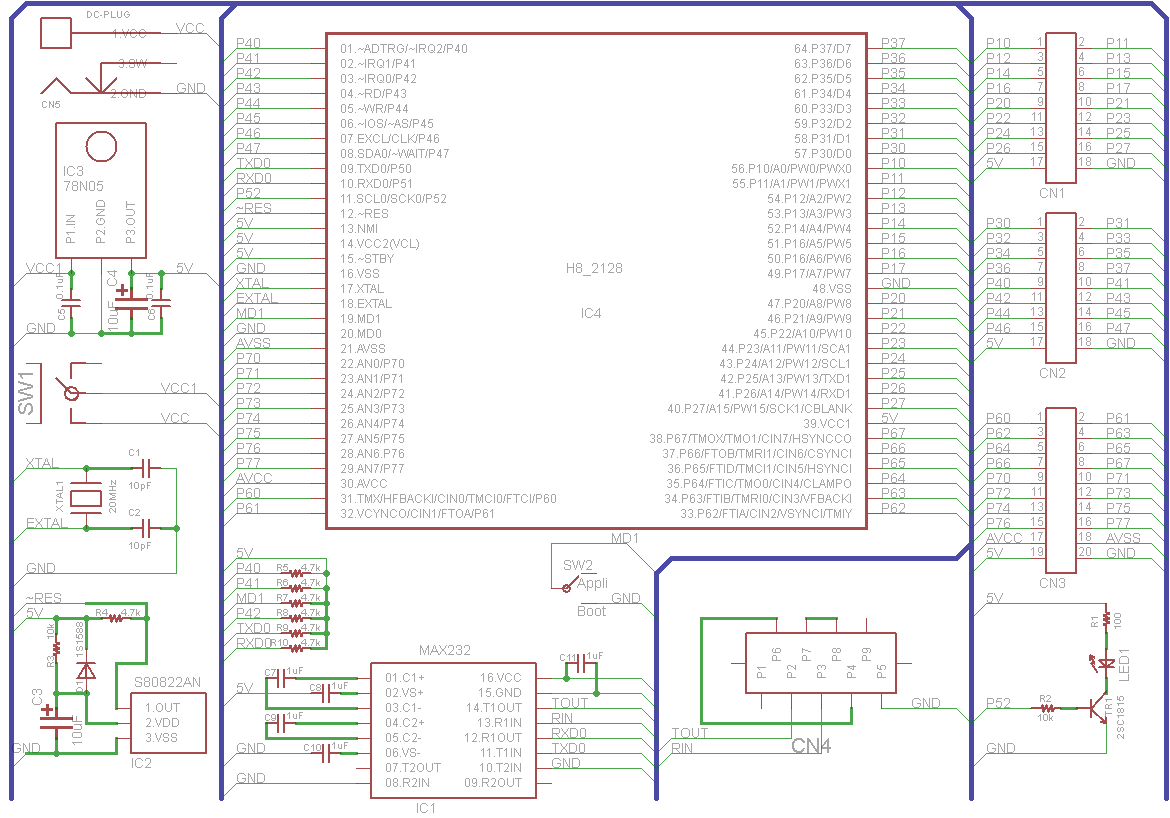
回路図
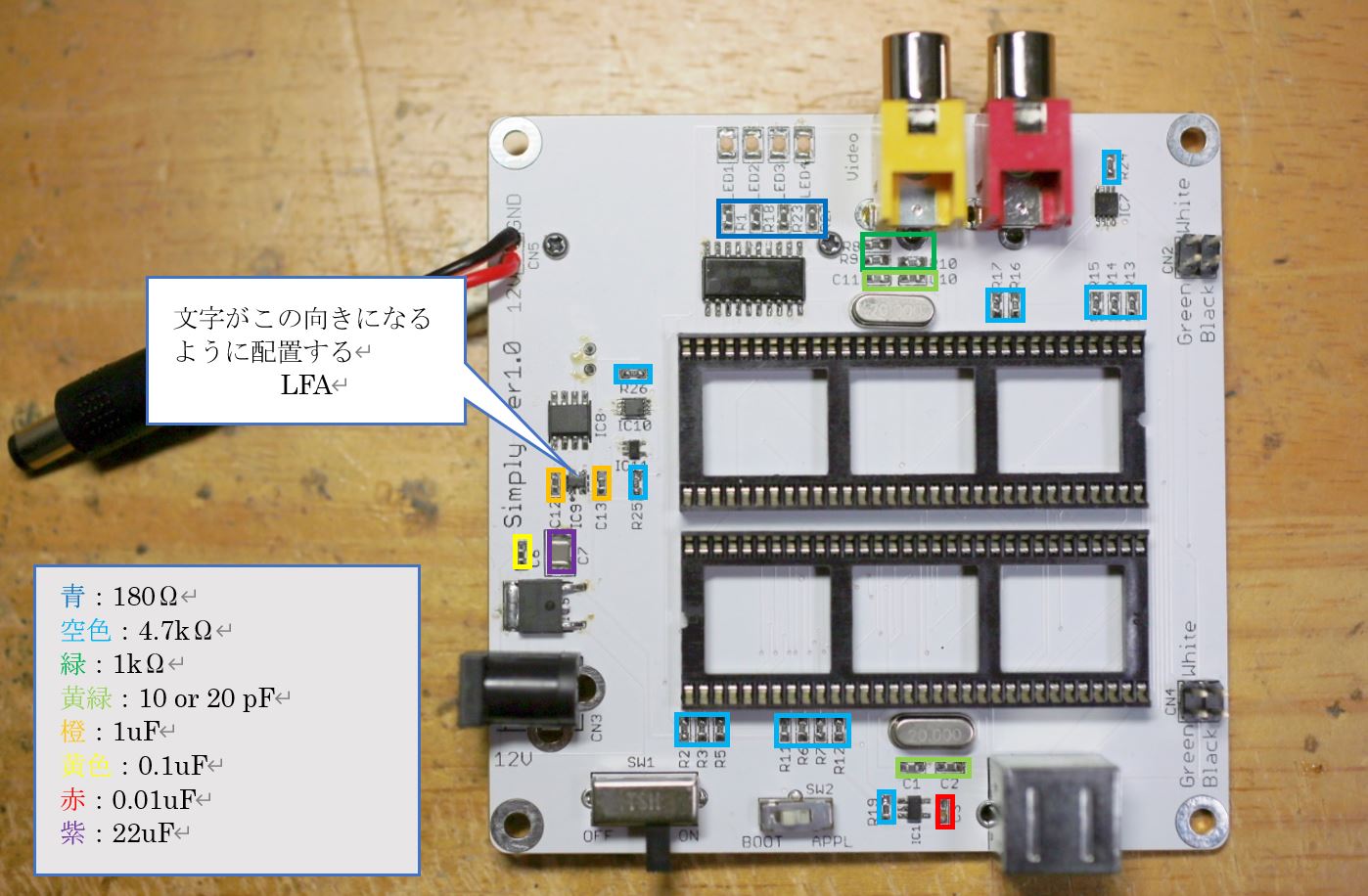
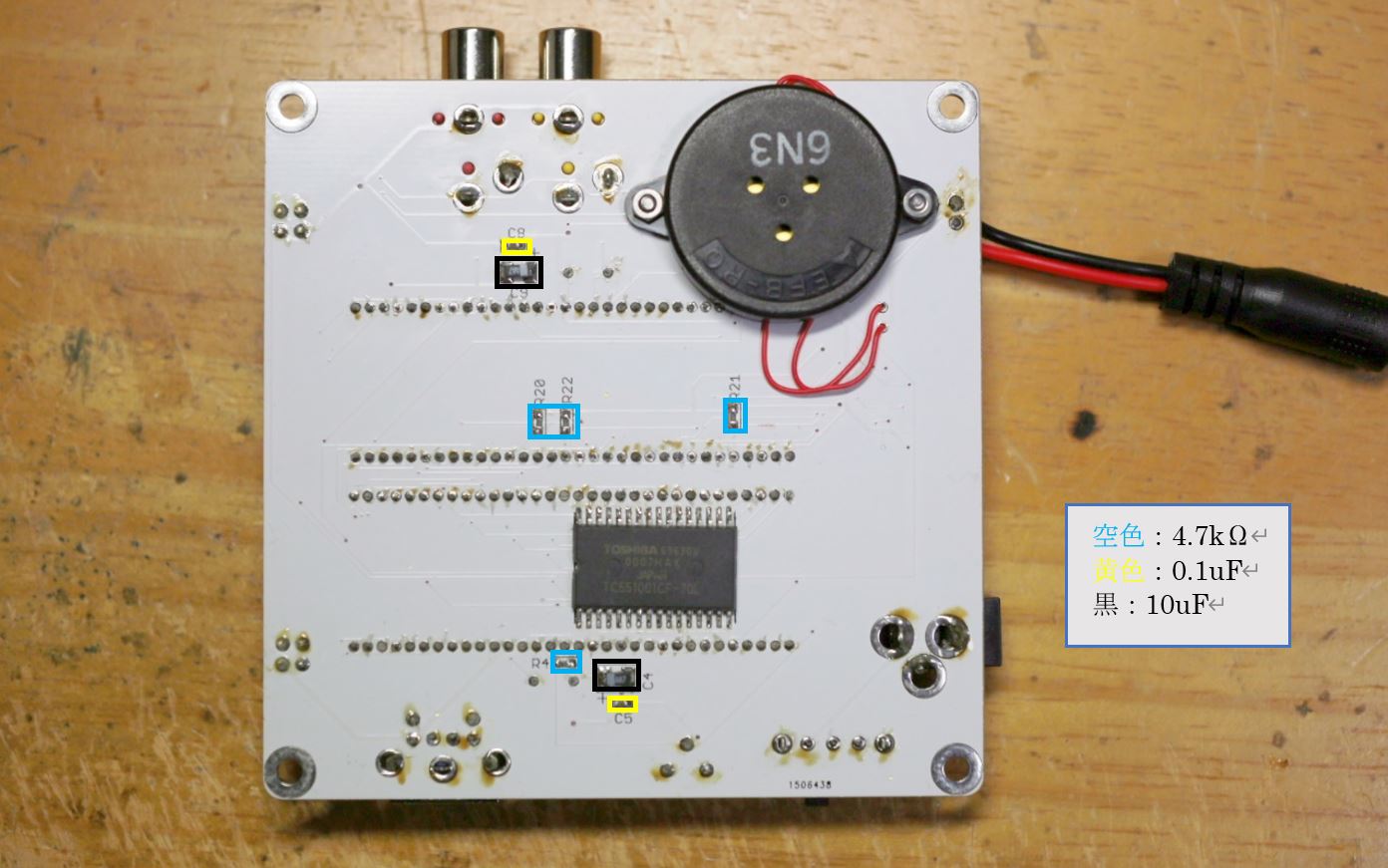
プログラミングツール
PCとRS232Cで接続した状態でH8S/2128をブートモードで起動させておいて、H8S2128OnBoardROMWriter.jarをダブルクリックして起動する。
例のようにCOMポートを引数に渡すと、指定したCOMポートを使って通信する。(デフォルトはCOM1)
画面上のボタンを押して、書き込むROMイメージファイル(motファイル)を選択すると書き込みが始まる。
例)
H8S2128ROMWriter.jar COM2
ROMWriterクライアント インストール方法
- JREをインストールする。
- RXTXをインストールする。
- H8S2128OnBoardROMWriter.jarをダウンロードし、適当なディレクトリに置く。
- H8S_2128_20MHz_Boot_01.binをダウンロードし、H8S2128OnBoardROMWriter.jarと同じディレクトリに置く。
ダウンロード H8S2128OnBoardROMWriter.jar
H8S_2128_20MHz_Boot_01.bin
【起動直後の画面イメージ】
【書込み完了時の画面イメージ】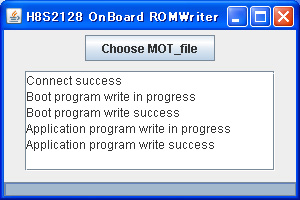
組み立てキット
H8S/2128 starter board(ROM Writer用)
電源を入れるとシングルチップアドバンスモード(モード2)で起動する。
回路図
H8S/2128 starter board 学習キットマニュアル
マニュアルのダウンロード
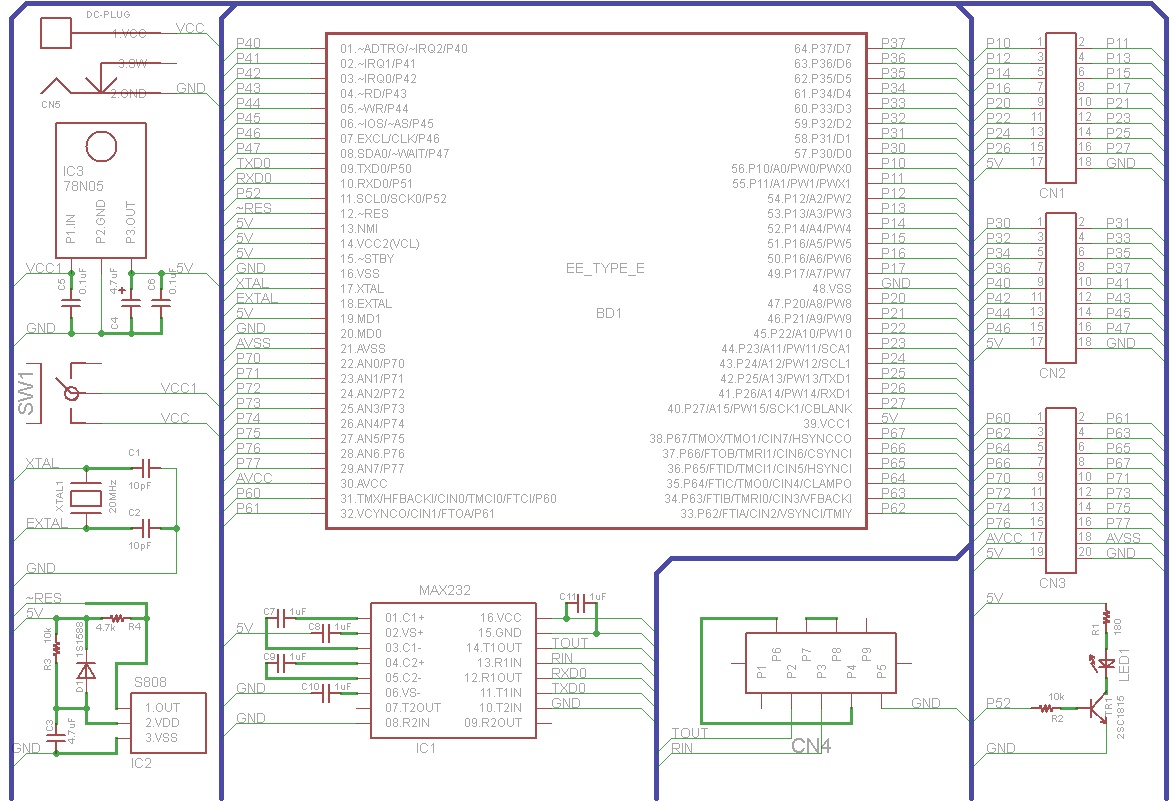
H8S/2128 ROM Writer
使い方
- プログラムするH8S/2128をROMWriterにセットする。(ワンタイム版、フラッシュ版どちらとも書き込み可能)
- PCとRS232Cで接続した状態でROMWriterの電源を入れる。
- PC上でROMWriterクライアントダブルクリックして起動する。
- 書き込むROMイメージファイル(motファイル)を選択する。
- 書き込み完了まで待つ。
回路図
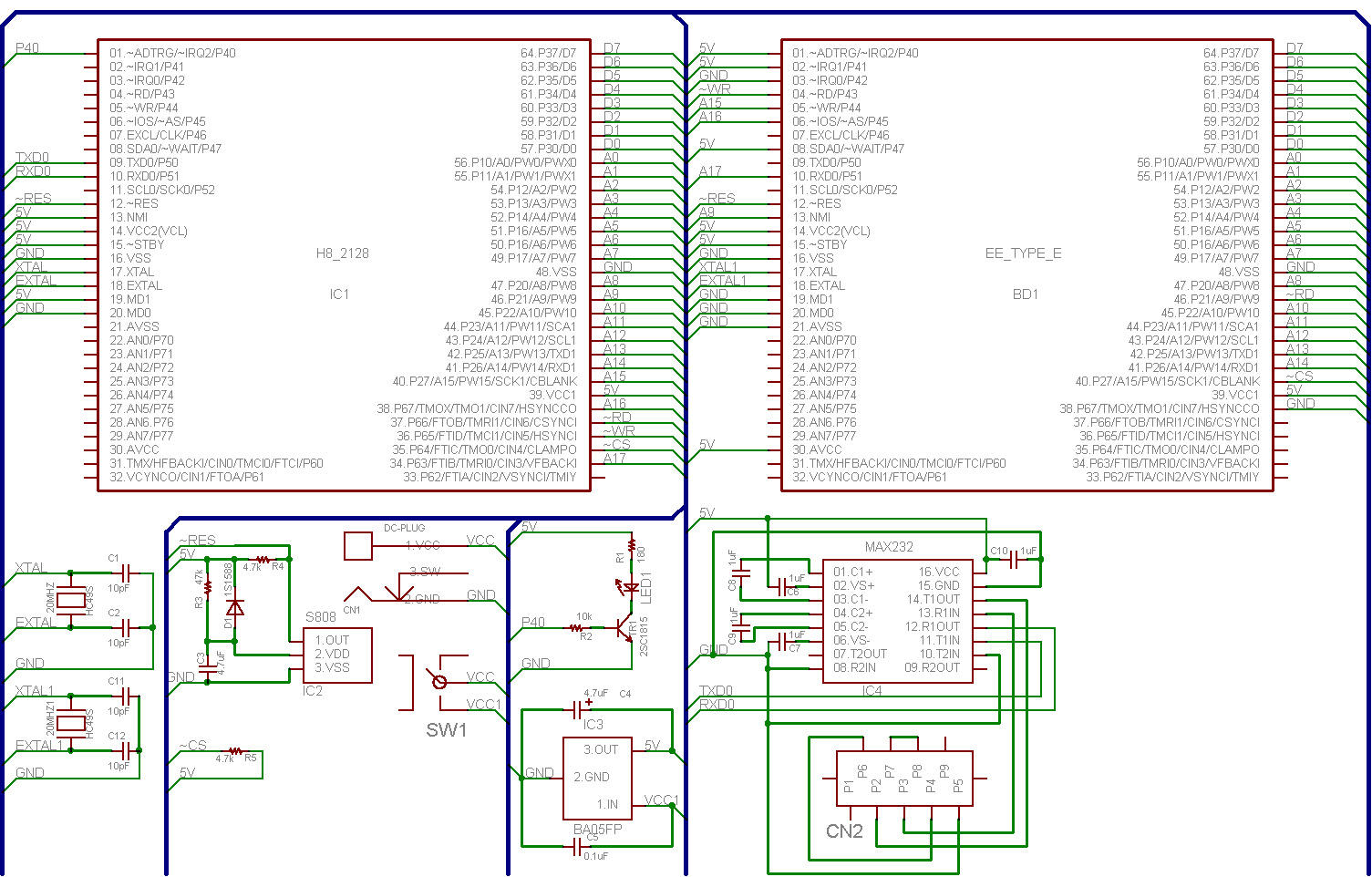
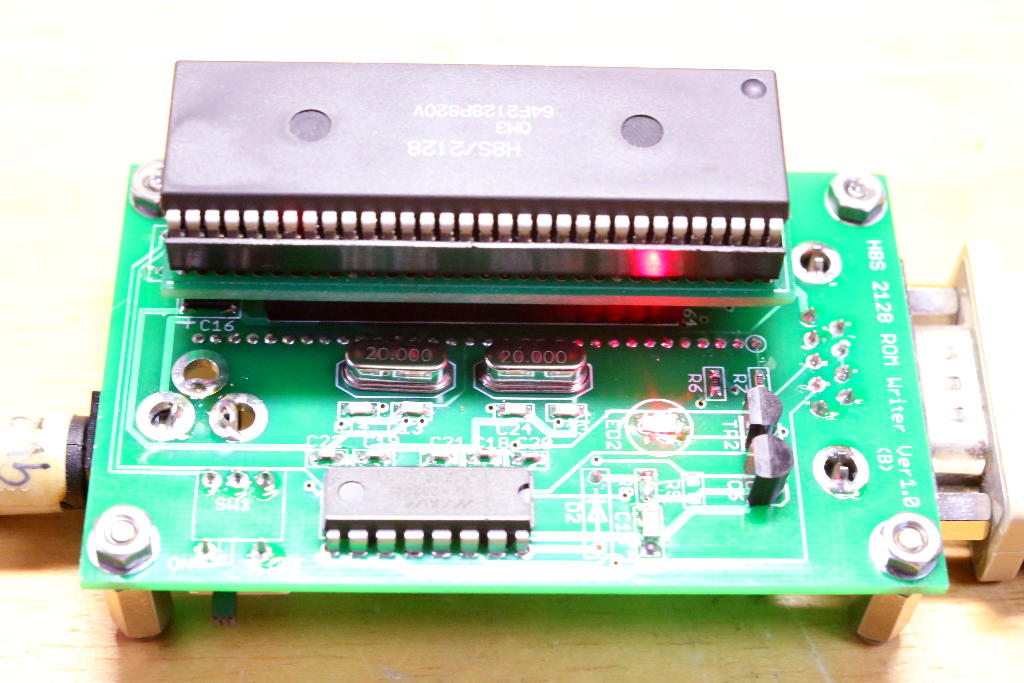
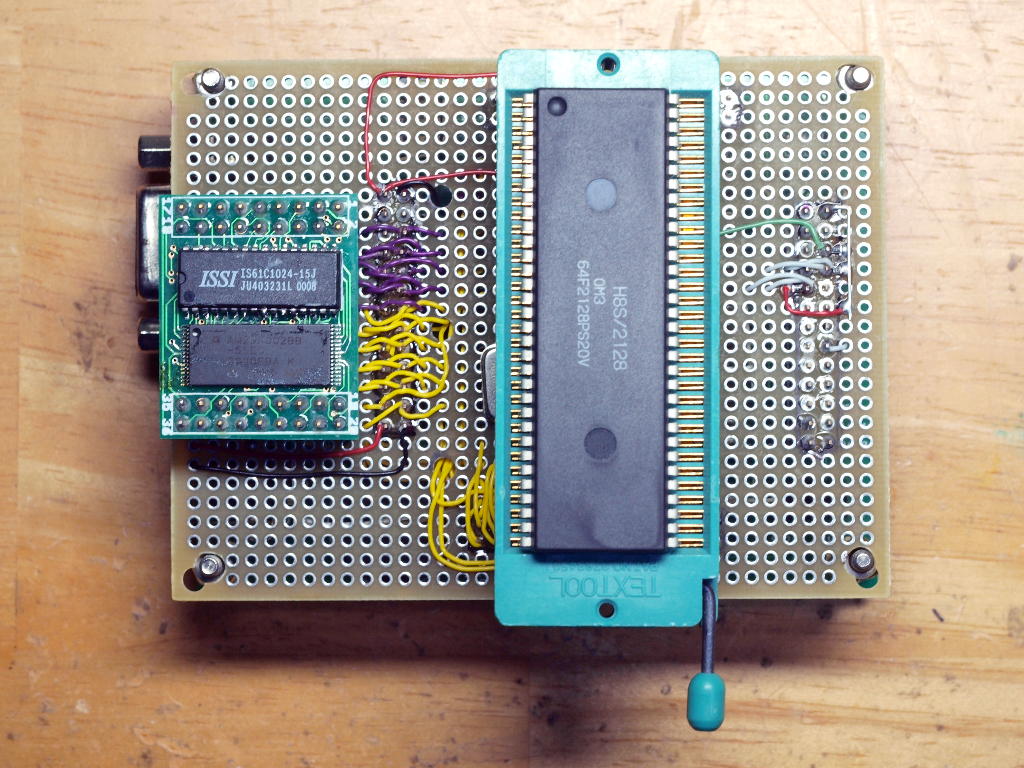
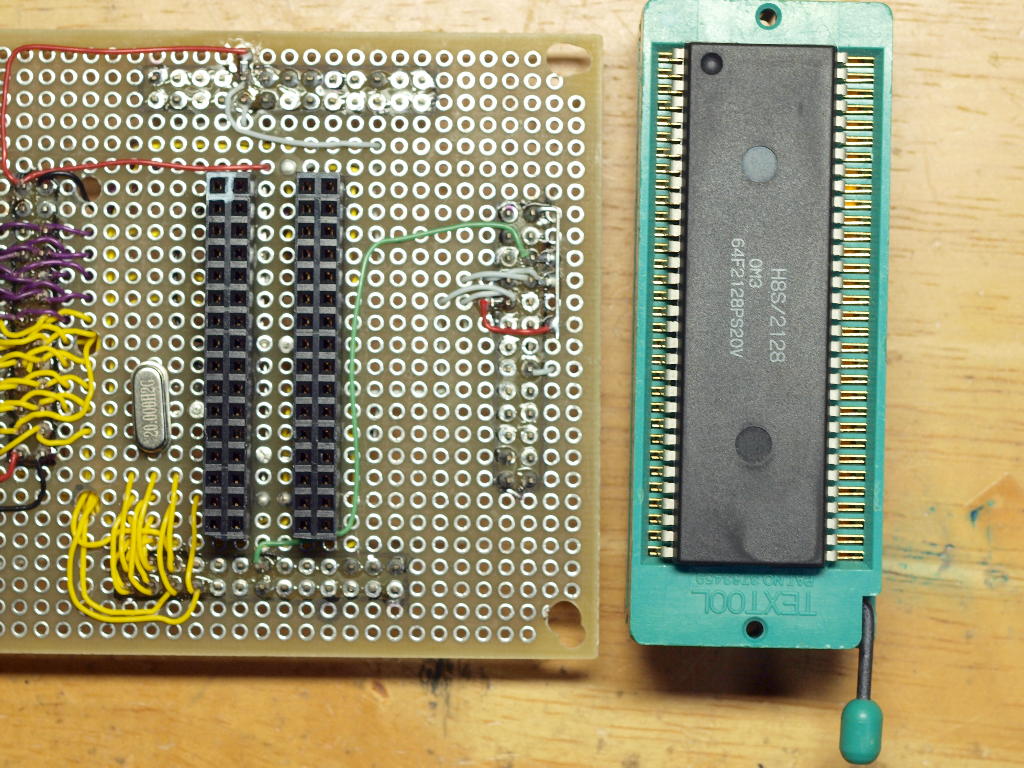
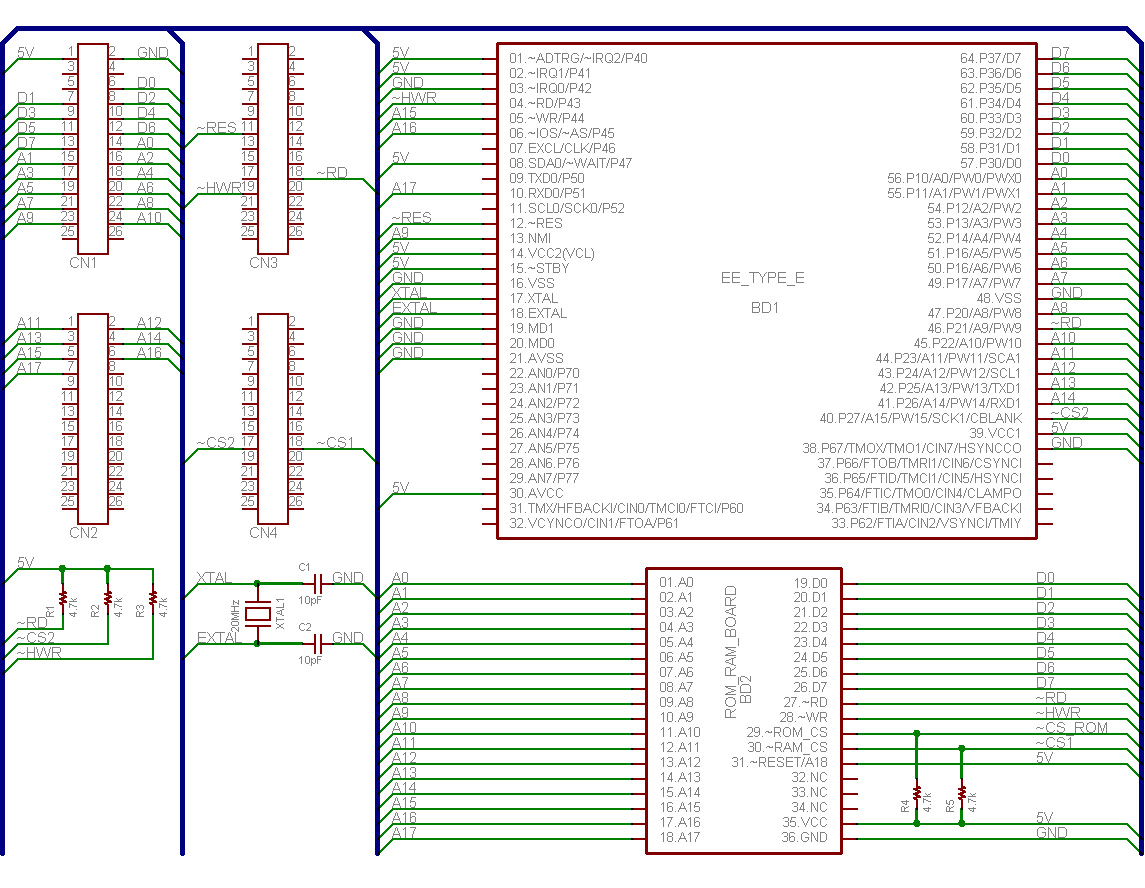
H8S/2128 ROM Writer 試作機
使い方
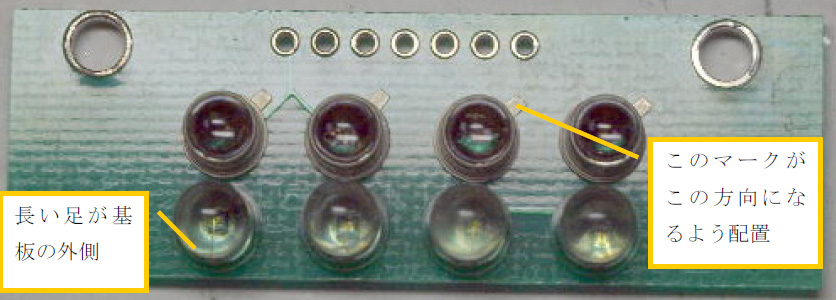
- プログラムするH8S/2128をROMWriterにセットする。(ワンタイム版、フラッシュ版どちらとも書き込み可能)このとき、CPUはCPUの1番ピンとZIFコネクタのレバーが逆方向になるようにZIFコネクタに装着する。基板コネクタとCPUは、CPUの1番ピンが基板コネクタの白マークと同じ方向になるように差し込む。(左の下側の写真を参照)
- PCとRS232Cで接続した状態でROMWriterの電源を入れる。
- TeraTerm(38400bps)からeコマンドを発行し、書込み済みプログラムを消去する。(ワンタイム版ではこの手順は不要。実施しても壊れない。)
- TeraTermの[ファイル]-[ファイル送信]で書き込むファイル(motファイル)を選択する。
- 書き込み完了まで待つ。
回路図
BD2は、AKI H83052 マザーボードで紹介しているROM・RAMボードだ。ここでは、RAMだけを使った。
CN1〜4は、EE_Type_S/2238の【マザーボード】の回路図のCN4〜7に対応する。
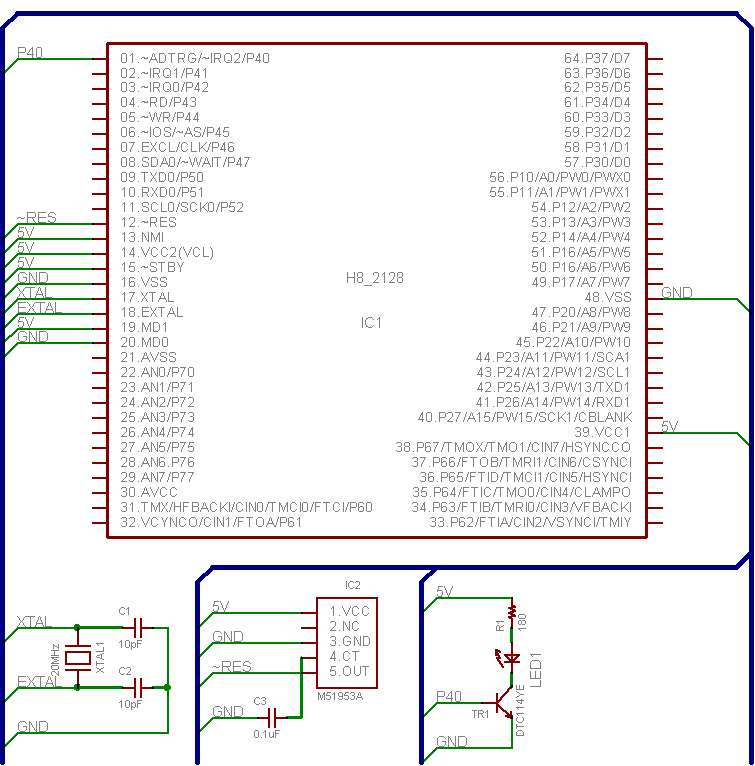
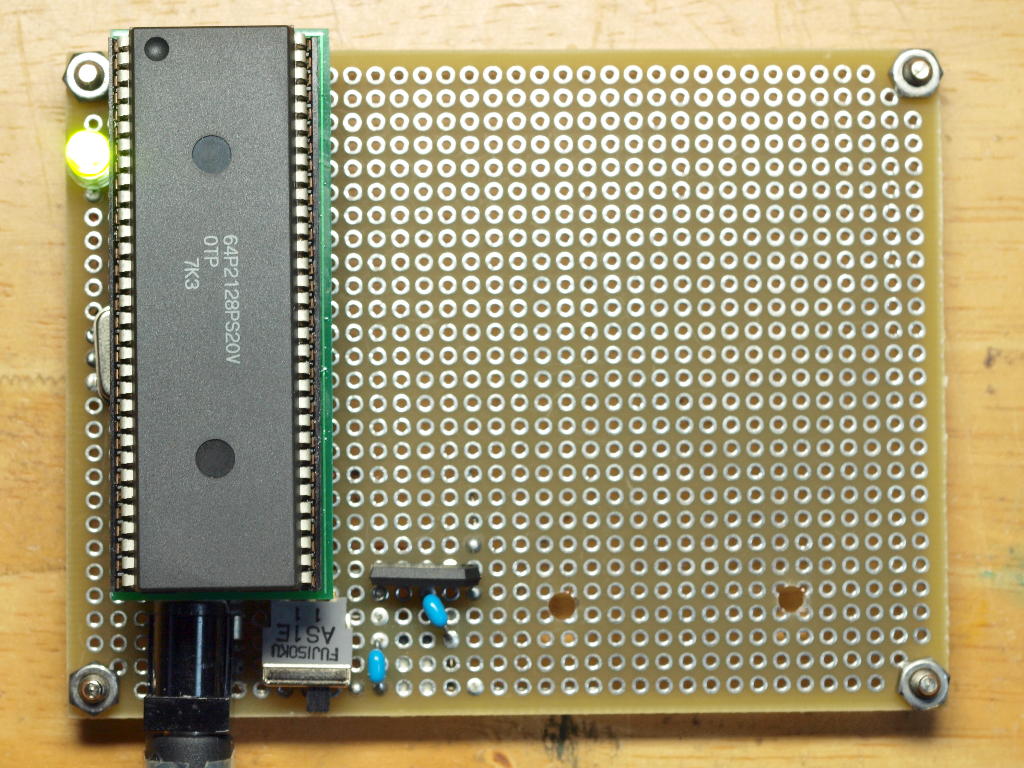
最も簡単なH8S/2128マイコン
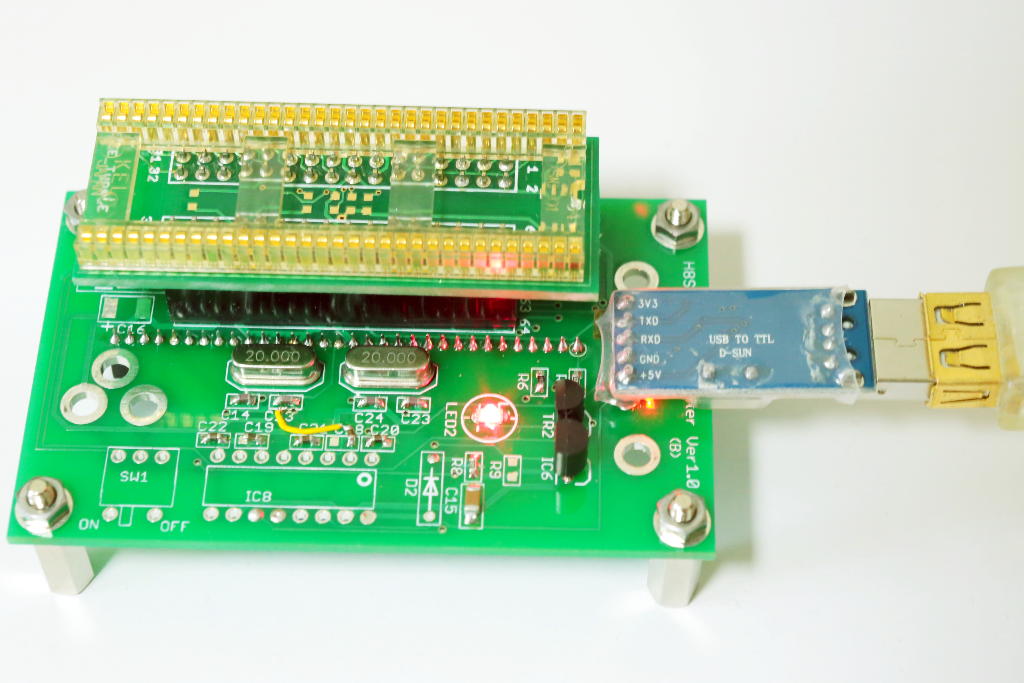
H8S/2128 ROM Writer USB
使い方
- プログラムするH8S/2128をROMWriterにセットする。(ワンタイム版、フラッシュ版どちらとも書き込み可能)
- ROMWriterにUSBケーブルを接続する
- PC上でROMWriterクライアントダブルクリックして起動する。
- 書き込むROMイメージファイル(motファイル)を選択する。
- 書き込み完了まで待つ。
- USBケーブルを抜く。
※ 複数のROMに書き込む場合、以上の手順を繰り返す。
ROMWriter クライアント
PCとRS232Cで接続した状態でROMWriterの電源を入れた後に、H8S2128ROMWriter.jarをダブルクリックして起動する。
例のようにCOMポートを引数に渡すと、指定したCOMポートを使って通信する。(デフォルトはCOM1)
画面上のボタンを押して、書き込むROMイメージファイル(motファイル)を選択すると書き込みが始まる。
例)
H8S2128ROMWriter.jar COM4
ROMWriterクライアント インストール方法
- JREをインストールする。
- RXTXをインストールする。
- H8S2128ROMWriter.jarをダウンロードし、適当なディレクトリに置く。
ダウンロード ROMWriterクライアント
【画面イメージ】
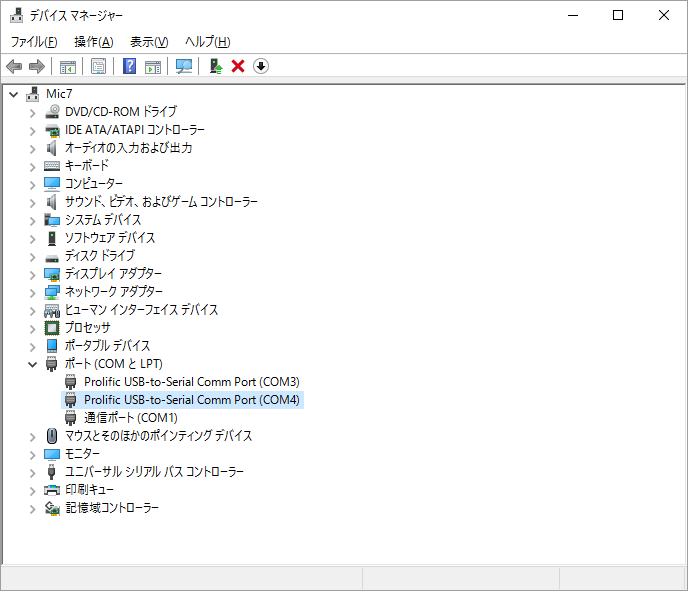
補足
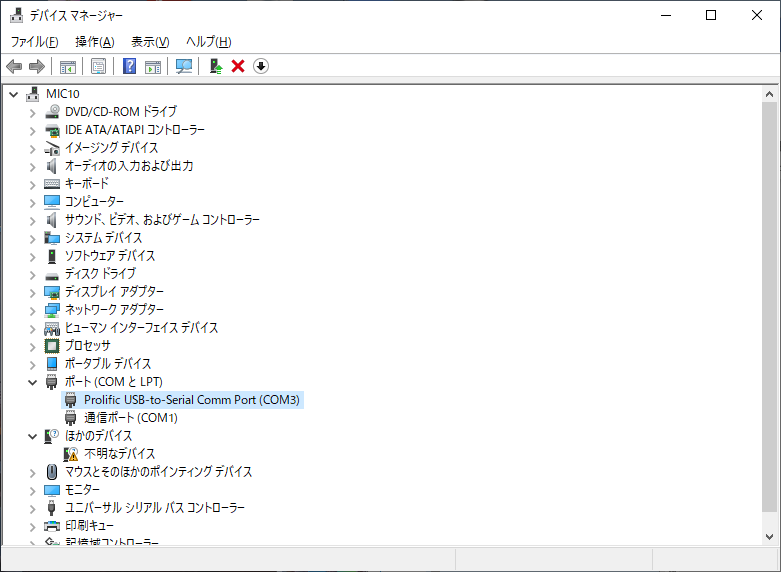
- ROMWriterクライアントに指定するComポートは、予めデバイスマネージャで確認しておくとよい。(ROMWriterを接続したときに追加されるCOMポートを指定する)
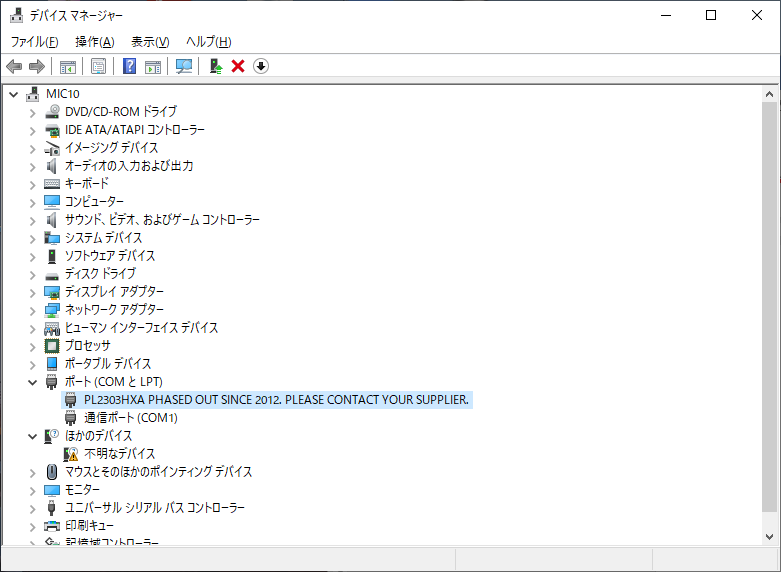
- Windows8以降でROMWriterが認識されない場合、PL2303HXAをWin10で使うを参照しドライバを更新してください。
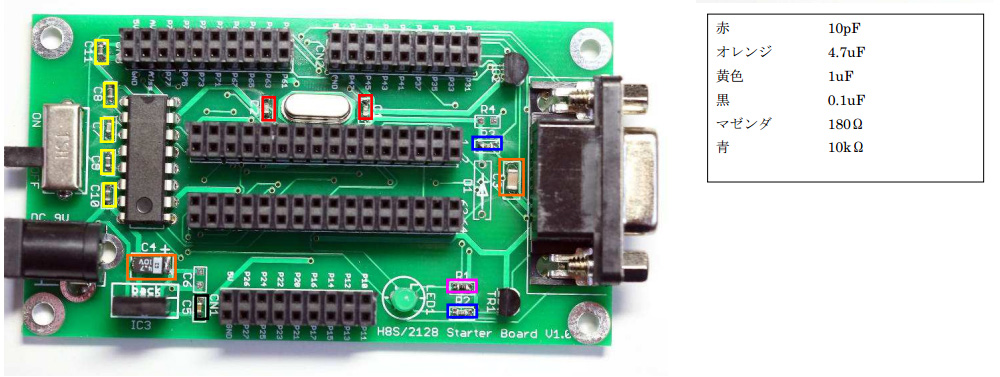
部品配置
PL2303HXAをWindows10で使う
※ Windows 8/8.1/10 are NOT supported in PL-2303HXA and PL-2303X EOL chip versions.
ここではWin10でPL2303HXAを使う方法をまとめる。
全体の流れ
※ Windowsのアップデートなどで、ドライバが更新されて使えなくなったたときは、再度2のドライバの更新を実施すれば復旧する。【ドライバーをインストールする】 下記のドライバーをダウンロードし、インストールする。
PL2303_Prolific_DriverInstaller_v1210ダウンロード
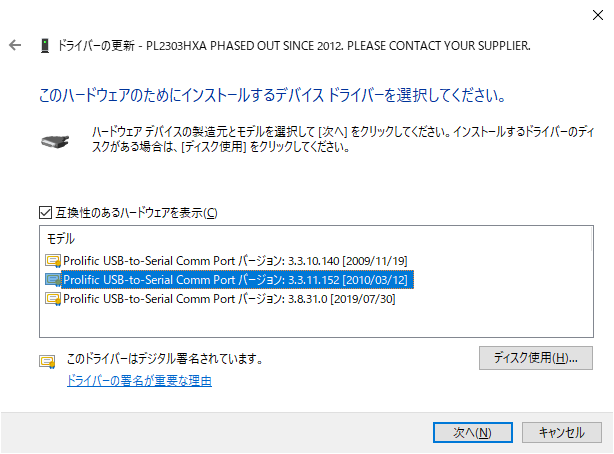
【ドライバーを更新する】
- スタートボタンを右クリックし、デバイスマネージャを起動する。
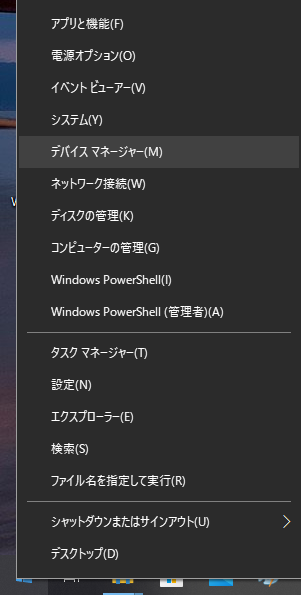
- ポート(COMとLPT)の中で認識されないデバイスを左クリックし選択する
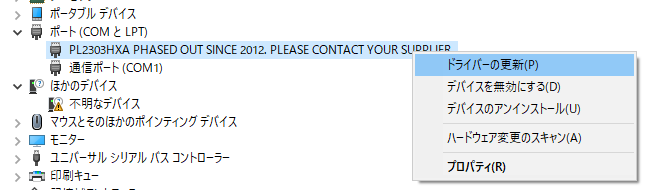
- 右クリックし、表示されたメニューのドライバーの更新を選択する
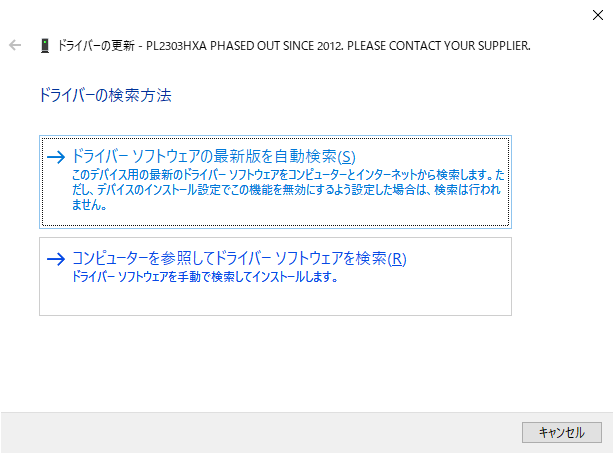
- コンピュータを参照してドライバーソフトウエアを検索を選択する
- コンピュータ上の利用可能なドライバの一覧から選択を選択する
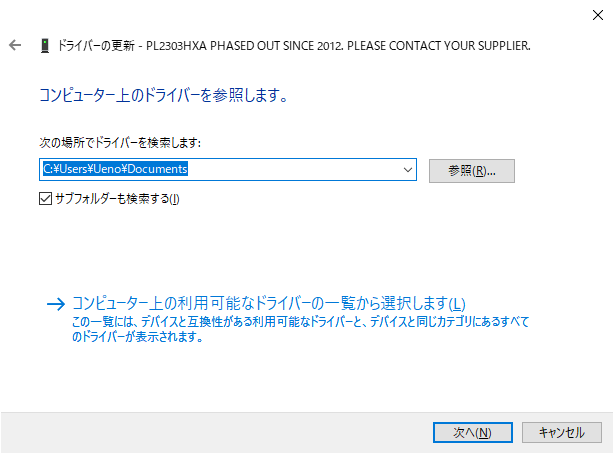
- 3.3.11.152 [2010/03/12]を選択する
このページの最初に移動
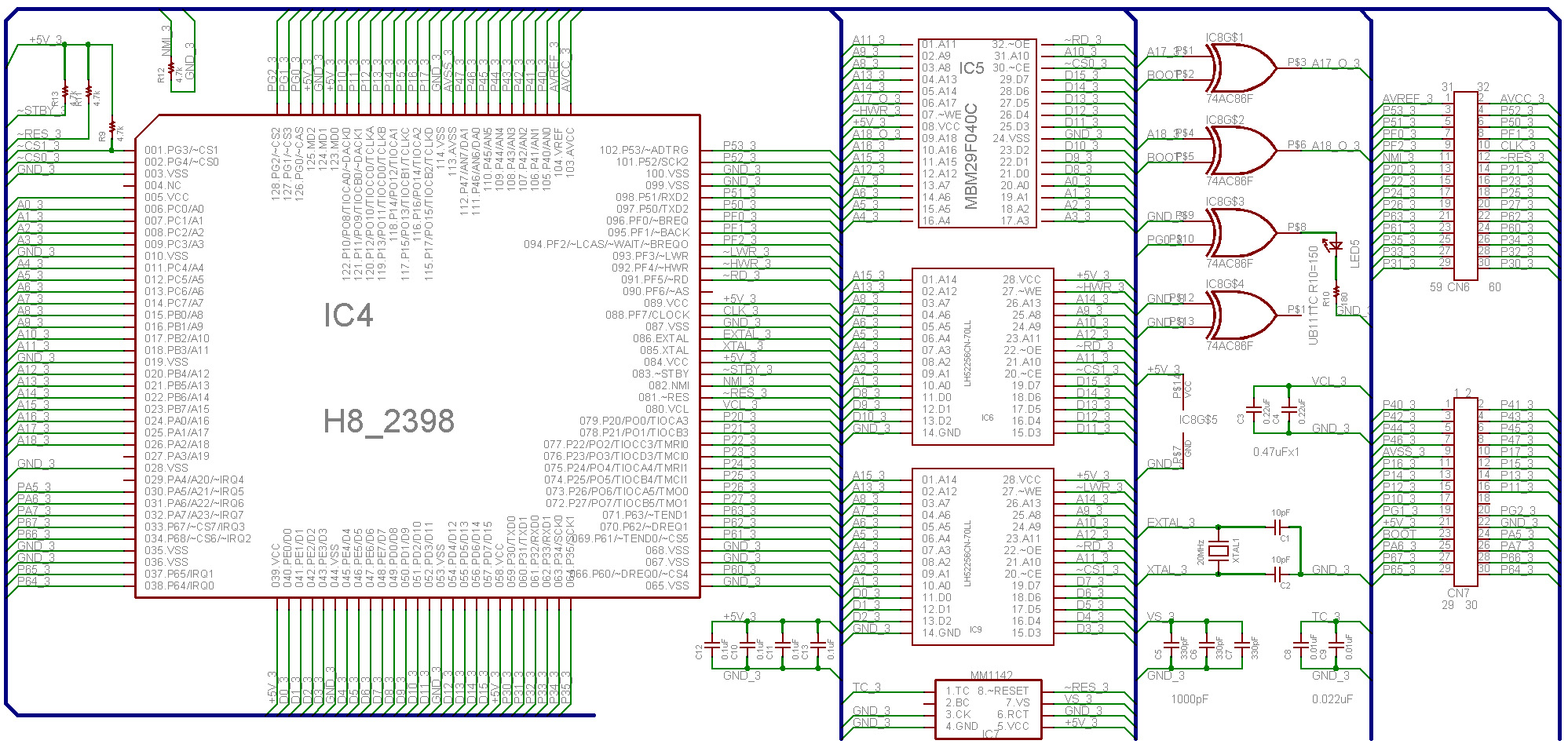
EE_Type_G
仕様
- CPU・・・・H8S/2398 20MHz
- 電源電圧・・・・5V
- RAM(内蔵)・・・・4 Byte
- RAM(外部:16bitバス)・・・・64k Byte
- ROM(外部:8bitバス)・・・・512k Byte
※ うち128k ByteをBOOTプログラム用に使用 - サイズ・・・・37mm×37mm
【概要】
CPUにH8S 2000コアのH8S/2398の外部にRAMとROMを増設したマイコン。
BOOTプログラムによって、ユーザが作成したプログラムを384kByteのユーザーエリアに書き込む。
【使い方】
- 電源を接続する。(5V(21Pin)を5Vに、GND(22Pin)をGNDに接続する。)
- NMI(41Pin)を5Vに接続する。
- RXD1(57Pin),TXD1(59Pin)をRS-232Cレベル変換し、PCに接続する。
- BOOT(23Pin)をLowにして電源を入れると、モニタプログラムが起動する。
- PCからRS-232C経由でプログラムを書き込む。
- BOOT(23Pin)をHiにして電源を入れると、書き込んだプログラムが起動する。
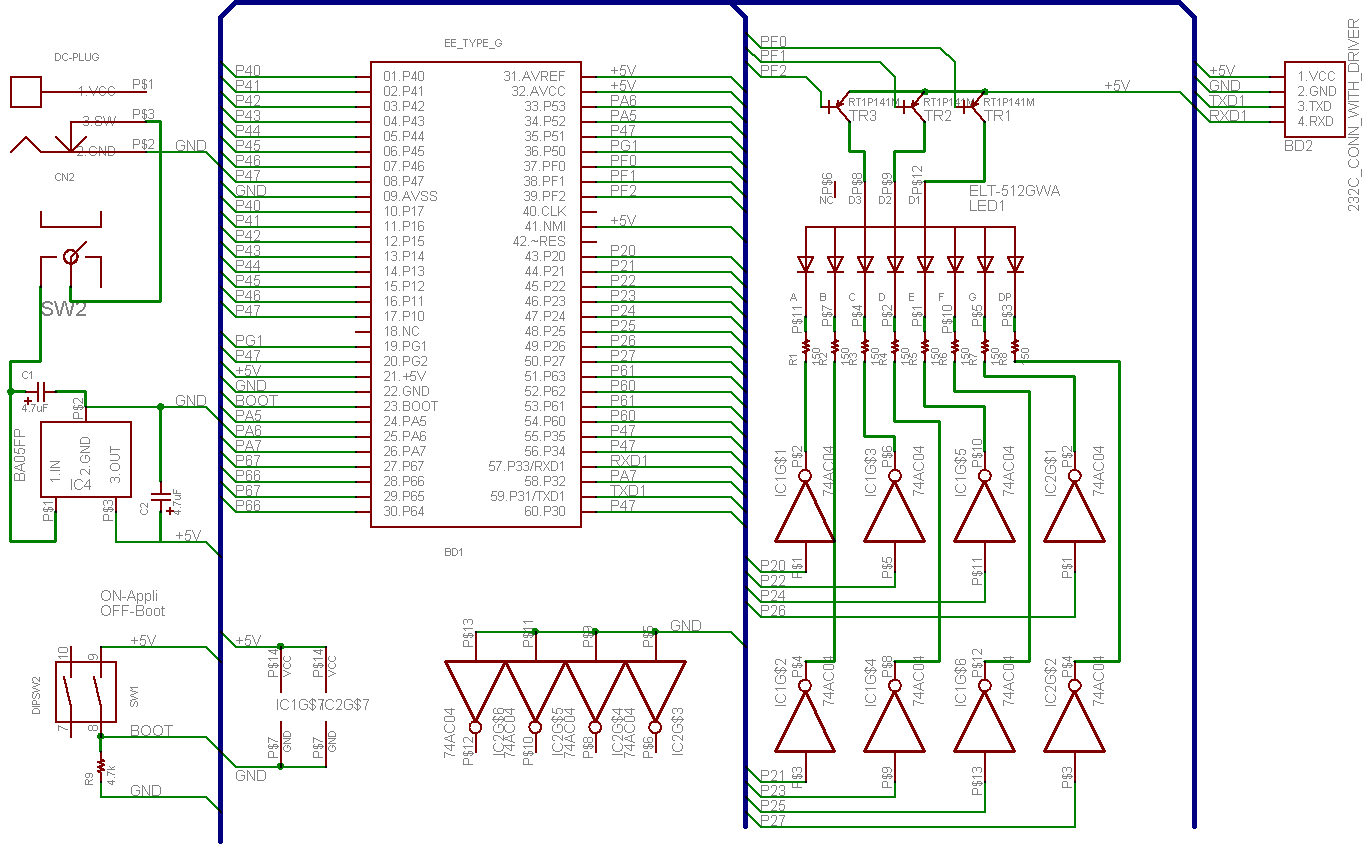
回路図
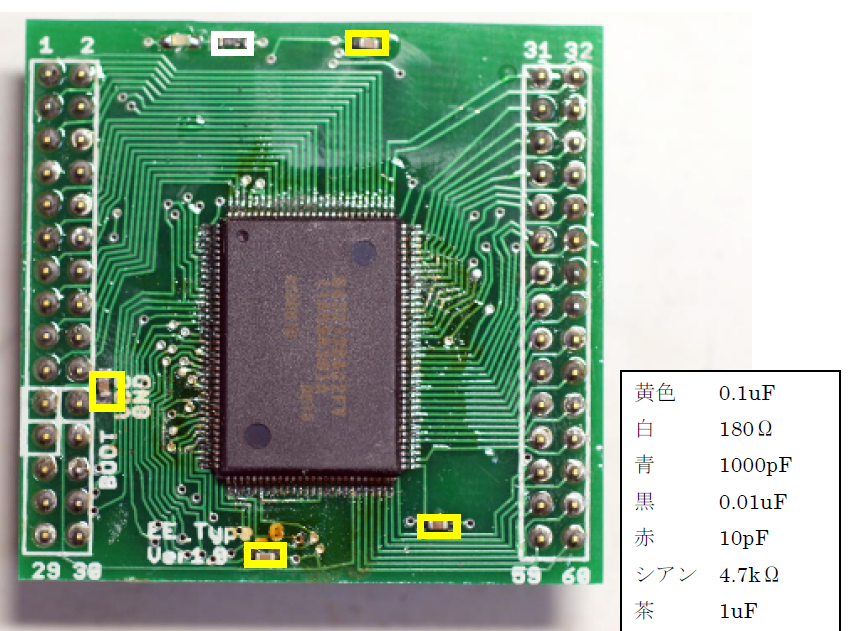
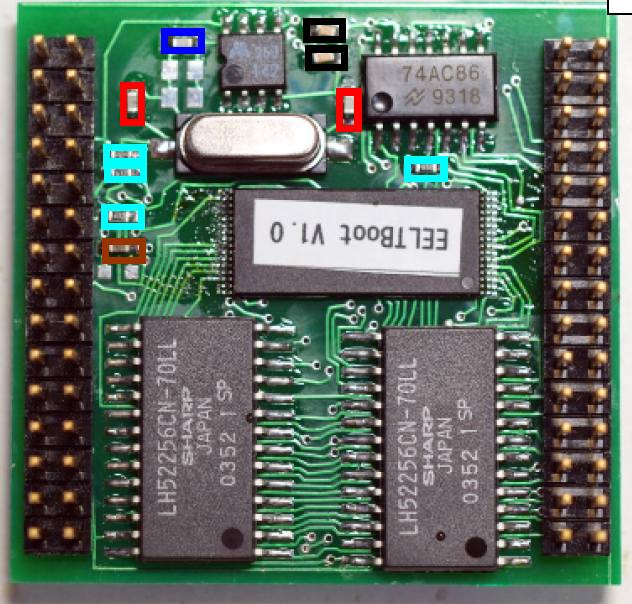
部品配置
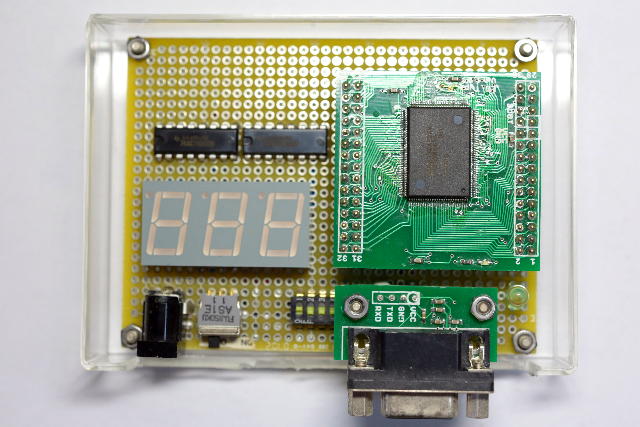
検査方法
- ソケットにEE_Type_GをセットしBootモードで起動する。
※ Bootモードで起動するにはDipSWの1番をOFFにした状態で電源を入れる。 - eコマンドでROMを消去後、EETypeGTesterをRS-232C経由で転送して書き込む。
- 電源を一旦切って、Appliモードで起動する。
※ Appliモードで起動するにはDipSWの1番をONにした状態で電源を入れる。 - 最終的に7セグLEDに9.8.7.が表示されれば合格。
EE_Type_Gの本体LEDが点滅した場合は、不合格。このときは7セグLEDにはエラー要因を表示する。
セルフチェックプログラム
セルフチェックプログラムソース
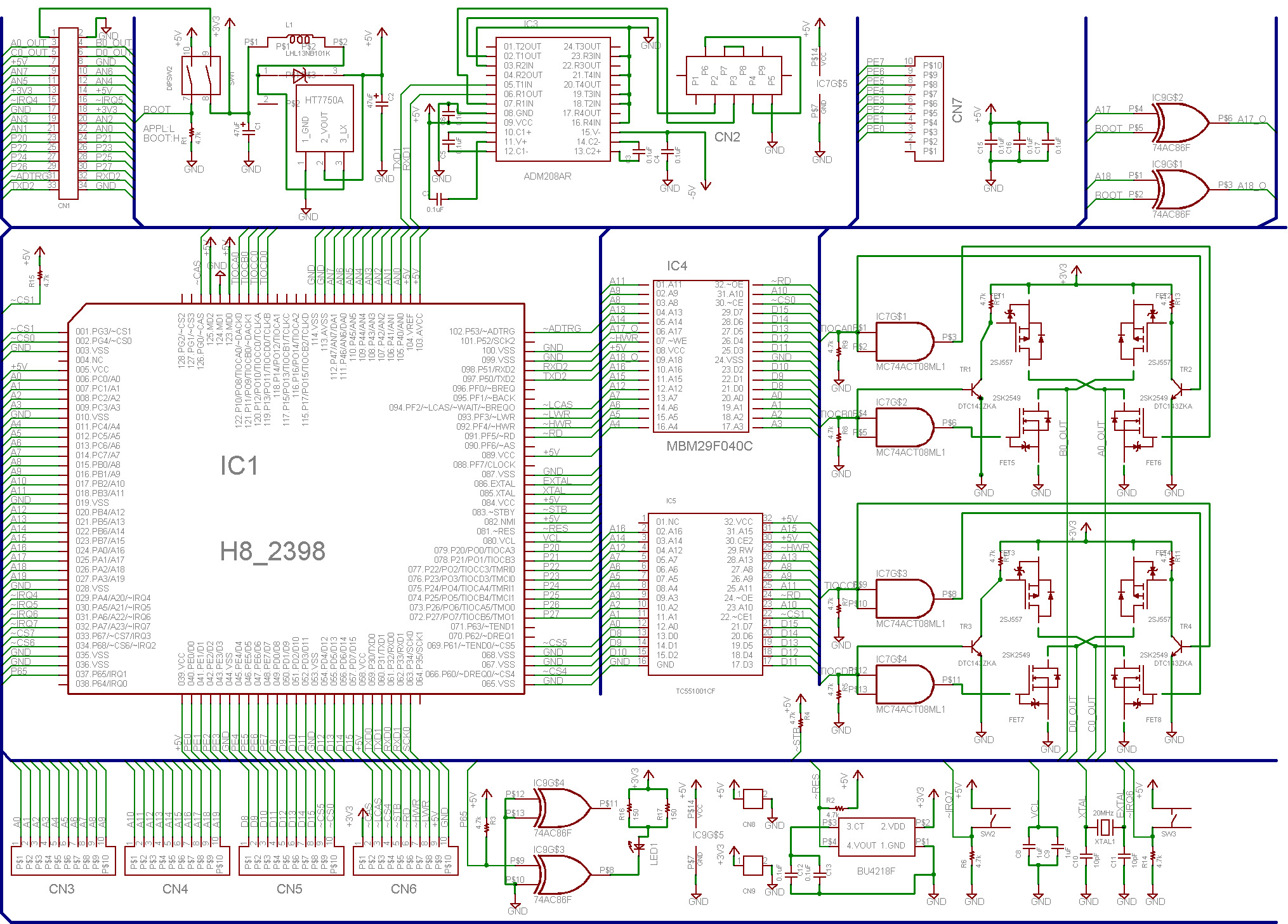
回路図
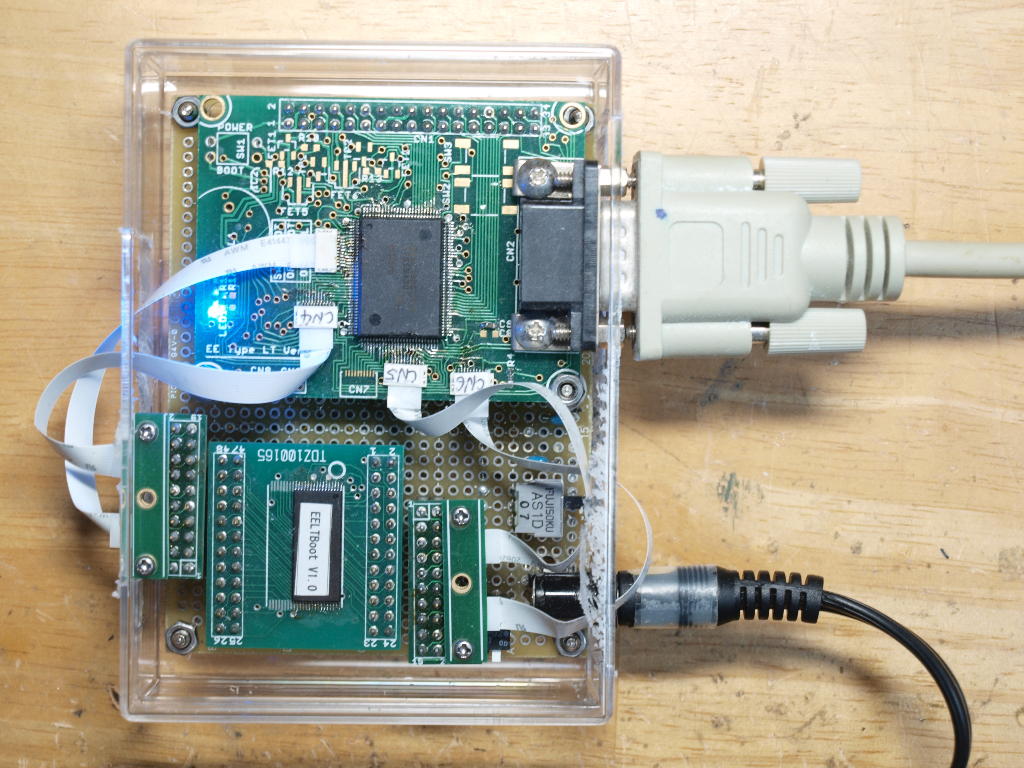
EE_Type_LT&G_モニタ開発環境
EE_Type_LTとGは外部RAMの接続とボード上のLEDの接続IO以外は基本的に同じなので、共通のハードウエアが使える。
EE_Type_LTは、アドレスバスを引き出せるため、EE_Type_LTをベースにした。
Tibi8CoreボードやEE_Type_LTのモニタは、38400BPS・行ごとに1msのウエイトを入れてプログラムの書き込みを行ったが、今回開発したモニタは通信速度57600BPS・ウエイトなしの書き込みを達成した。
その結果、250KBのmotファイルの書き込みに従来は1分50秒程度要していたが、43秒で書き込みができるようになった。ちなみに、AKI-H8/3052の内蔵ROMに同じプログラムをFDTを使って書き込んだところ39秒だった。
FDTに4秒(約10%)およばず。
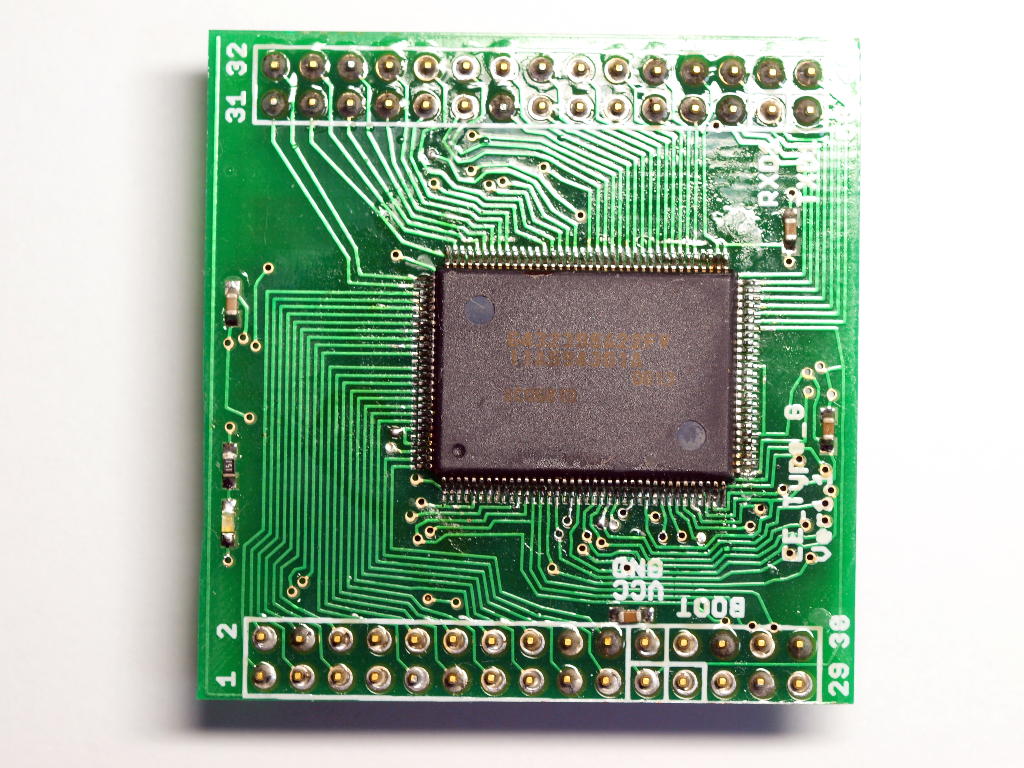
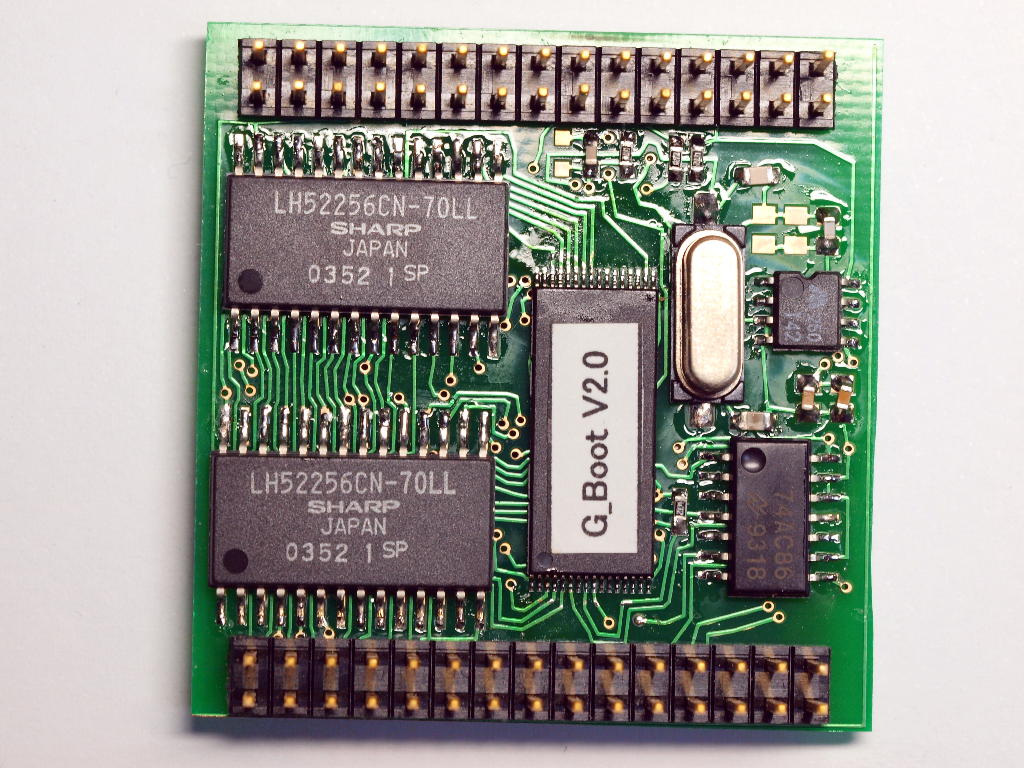
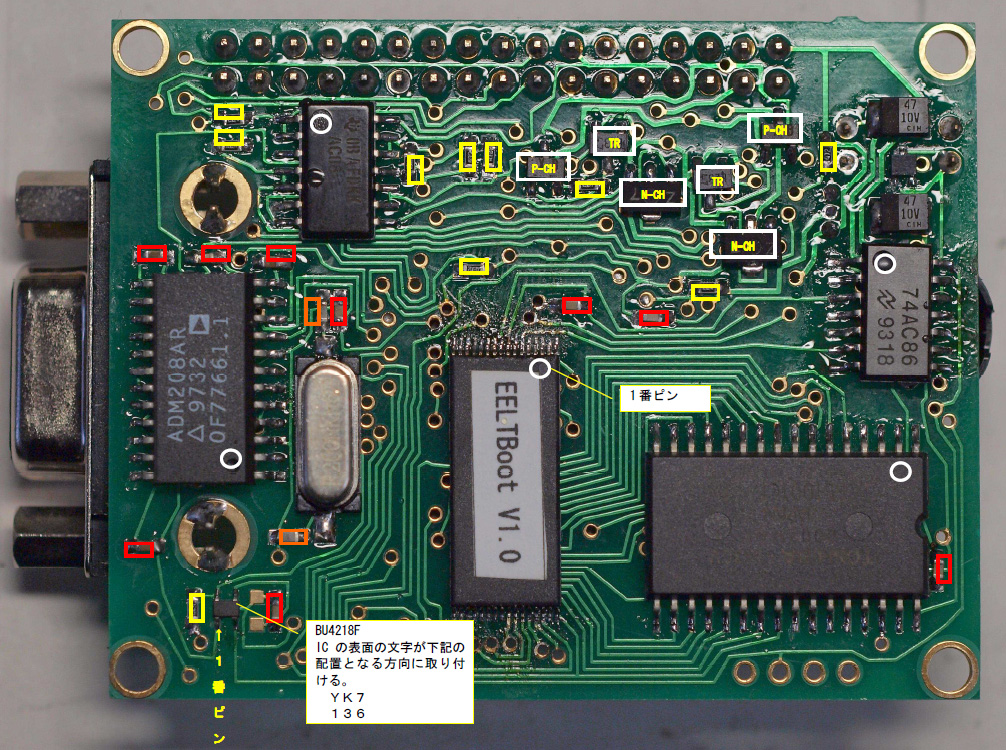
- EE_Type_LT BootWriter2.0のソケットにROM(写真の下の基板)を差し、モニタプログラムを書き込む。
- EE_Type_LT&G_モニタ開発環境にROMを差して、電源を入れる。
※ 写真下側のディップスイッチのSW1がOFFの状態で電源を入れるとモニタプログラムが起動する。
※ 写真下側のディップスイッチのSW1がONの状態で電源を入れるとアプリケーションプログラムが起動する。
EE_Type_LTモニタVer2.0(motファイル)
EE_Type_GモニタVer2.0(motファイル)
EE_Type_LT&G Boot ROMライター
- ソケットにROMをセットした状態で電源を入れる。
※ ROMはソケットの1番ピン側に寄せてROMをセットする。 - eコマンドでROMを消去後、EE_Type_LT用ブートプログラムをRS-232C経由で転送して書き込む。
EE_Type_LT BootWriter(motファイル)
EE_Type_LT BootWriter(プロジェクト)
EE_Type_LTモニタVer1.0(motファイル)
EE_Type_LTモニタVer1.0(プロジェクト)

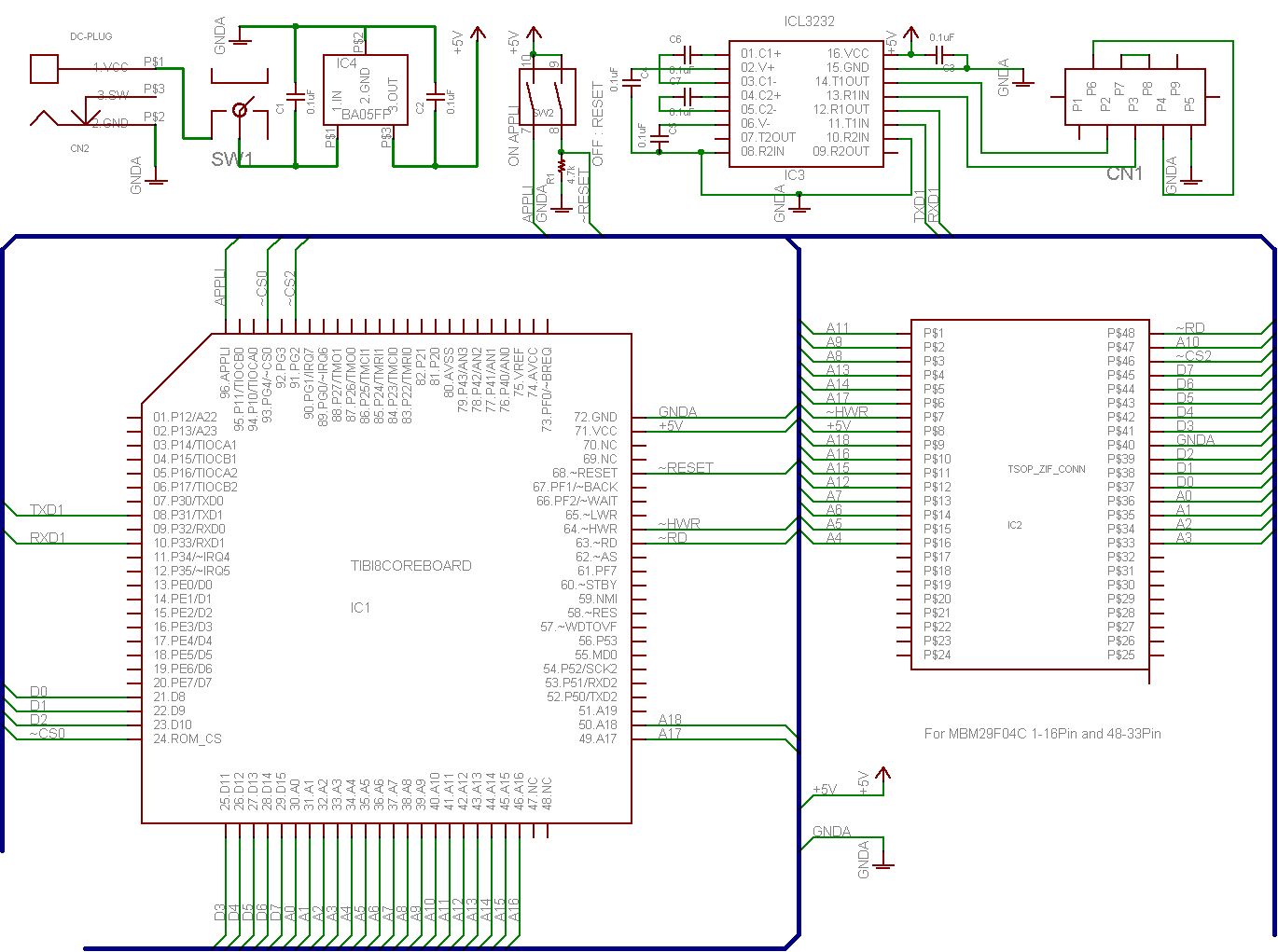
回路図
このページの最初に移動
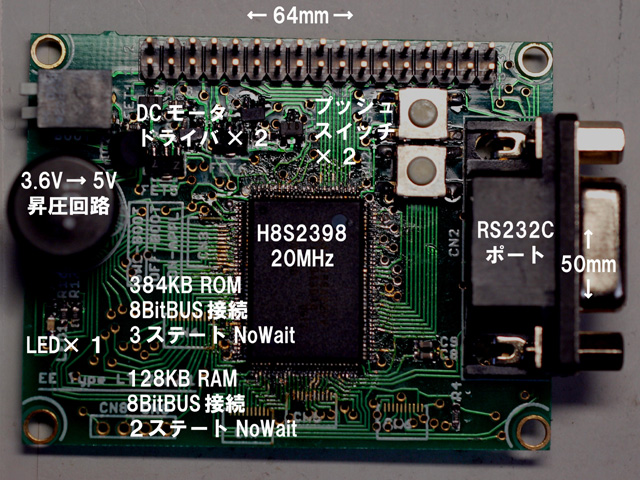
EE_Type_LT
仕様
- CPU・・・・H8S/2398 20MHz
- 電源電圧・・・・5V
- RAM(内蔵)・・・・4 Byte
- RAM(外部:8bitバス)・・・・128k Byte
- ROM(外部:8bitバス)・・・・512k Byte
※ うち128k ByteをBOOTプログラム用に使用 - サイズ・・・・37mm×37mm
【概要】
CPUにH8S 2000コアのH8S/2398の外部にRAMとROMを増設したマイコン。
BOOTプログラムによって、ユーザが作成したプログラムを384kByteのユーザーエリアに書き込む。
Hブリッジを2組搭載しており、DCモータ2個の回転方向と回転数の制御が可能。
電源に電池(3.6V)が使えるよう昇圧回路を内蔵した。
マニュアル
回路図
部品配置

このページの最初に移動
Tibi8
仕様
初めて基板を起こして作ったH8マイコン。
38x49mmの基板に、256KBのEEPROMとCPUの起動に必要なリセット回路や発振回路を詰め込みんだ。 5V電源といくつかの信号線の処理をするだけで起動するよう設計した。 256KBのROMの半分をブートプログラムで使用し、残り半分のROMにアプリケーションプログラムをロードする機能をブートプログラムで実現した。 RAMが4KBしかないため、マザーボードと組み合わせて使うことが前提だった。
組み合わせるマザーボードによってソフトウエアを変える必要があり、ソフトウエアの保守が大変になった。 この頃から、寿命の長いプログラムを作ることが課題となり、趣味で電子工作を楽しむにもハードウエアの違いを吸収する層が必要だと感じ始めた。
- CPU・・・・H8S/2240 20MHz
- 電源電圧・・・・5V
- RAM(内蔵)・・・・4k Byte
- (外部:8bitバス)・・・・256k Byte
※ うち128k ByteをBOOTプログラム用に使用 - サイズ・・・・38mm×49mm
- CN4の24ピンが開放またはLowのとき、電源を入れるとブートプログラムが走る。
- ブートプログラムは、シリアルポート1で通信し、モトローラSフォーマットのロードモジュールをアプリケーションプログラムとしてflashROMに書き込む。
- CN4の24ピンをHiにすると電源投入時にアプリケーションプログラムが走る。
ブートプログラム(motファイル)
ブートプログラム(プロジェクト)

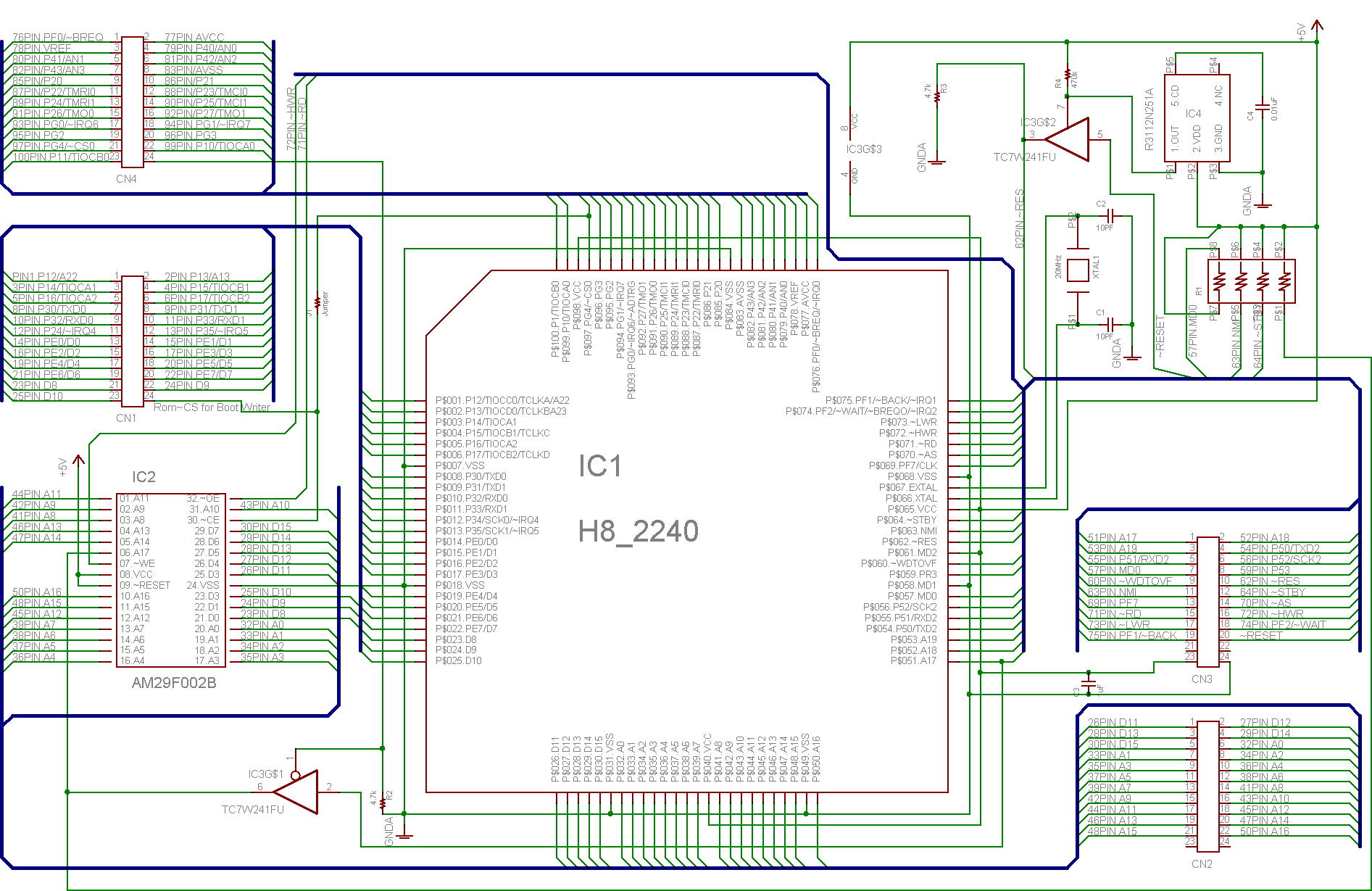
回路図
Tibi8ブートROMライター
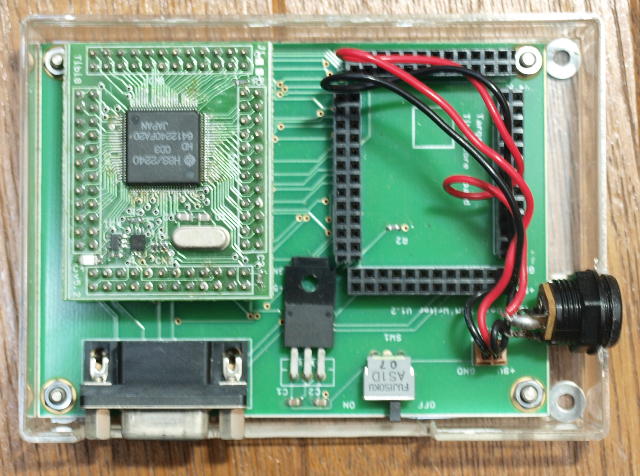
Tibi8Coreボードに使っているCPUは、ROMレス版なのでアプリケーションプログラムをロードするためのプログラム(ブートプログラム)は予めROMに書き込む必要がある。 通常は、ROMWriterでプログラムを書き込んだROMを基板に実装するが、この頃は0.5mmピッチのSMDのROM用のソケットを持っていなかったので、ROM単体の状態でプログラムを書き込む手段がなかった。そこで、実装済みのTibi8CoreボードのCPUにバスを開放させて(H8はスタンバイ状態にするとバスを開放する)、別のCPUからTibi8Coreボードに実装したROMにプログラムを書き込む方法をとった。
- 左側のTibi8CoreボードのアプリケーションプログラムとしてTibi8ブートROMライターをロードしておく。
- 右側のソケットにブートプログラムを書き込むTibi8Coreボードをセットして、電源を入れる。
- RS-232Cケーブルで接続したPCのターミナルソフト(TeraTerm)からブートプログラムをロードする。
Tibi8ブートROMライター(motファイル)
Tibi8ブートROMライター(プロジェクト)
回路図
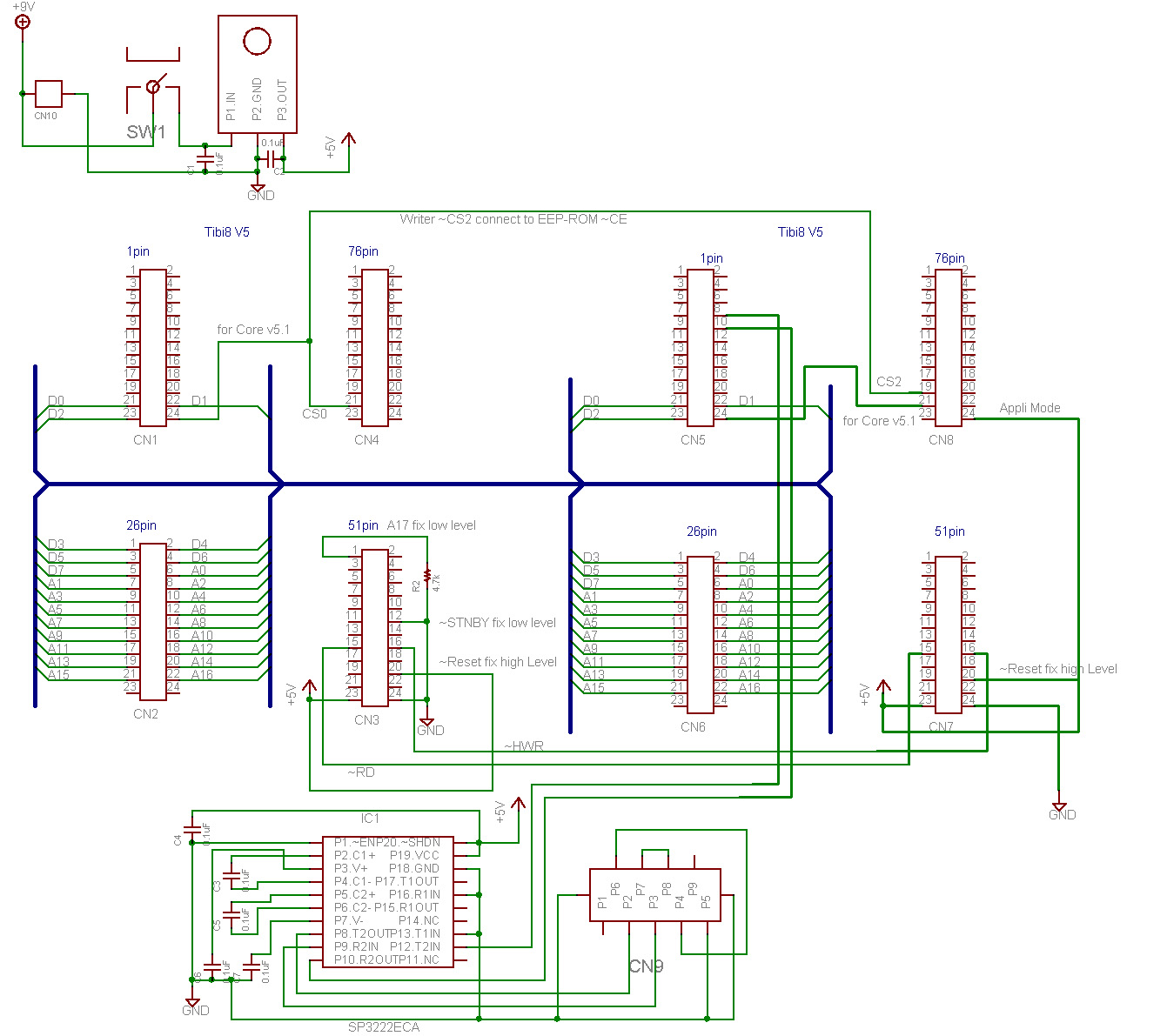
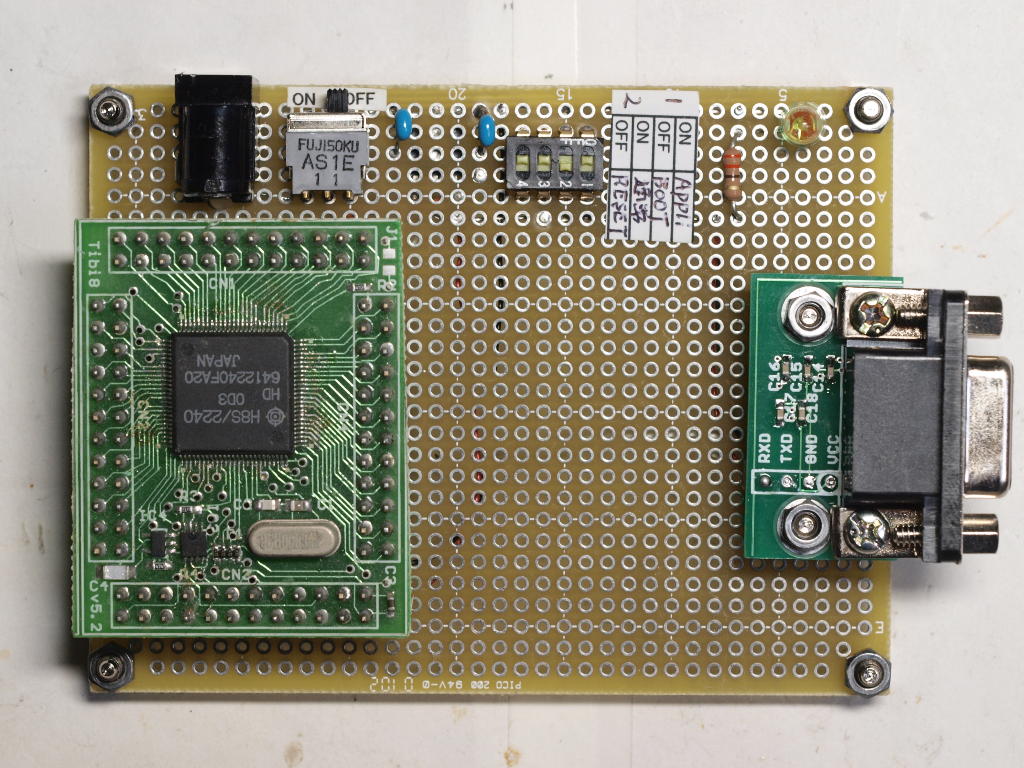
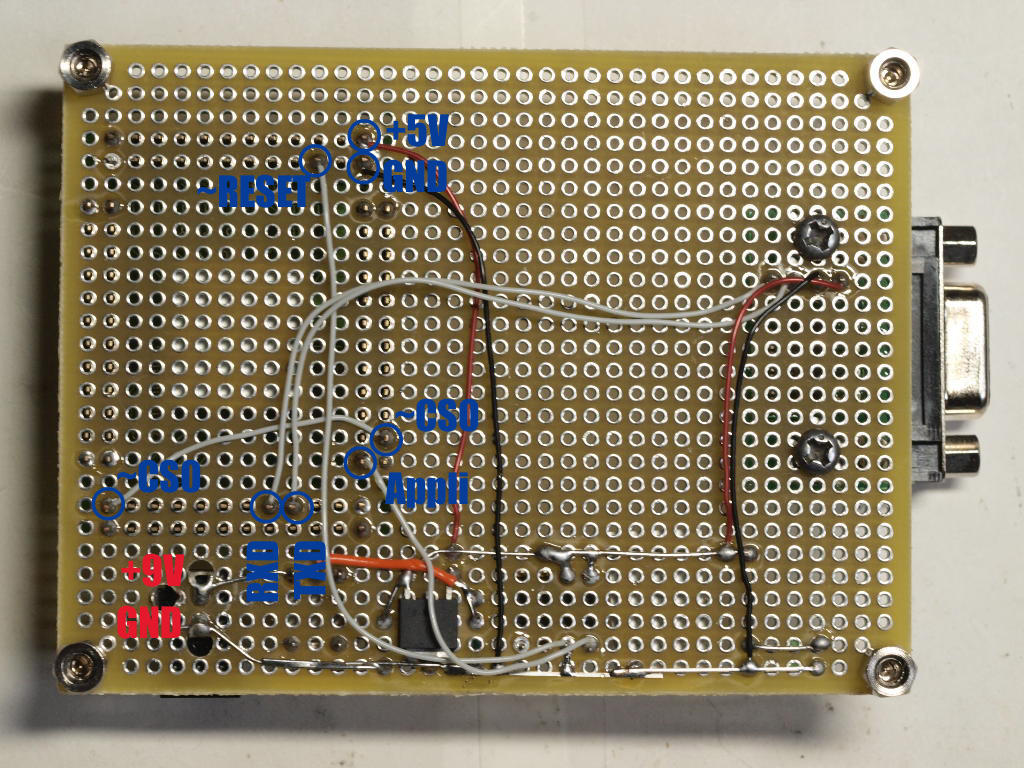
マザーボード
Coreボード上のJ1をジャンパすれば、~CS0の配線は不要。
Appli信号を+5Vに接続するとAppliモードで、開放するとBootモードで起動する。
~RESETは、+5Vに接続しないと起動しない。この端子をLOWにするとリセットされる。このMBでは~RESET信号を4.7Kでプルダウンした信号を、SWを通して5Vに接続した。
このページの最初に移動
AKI-H8/3052F USB マザーボード
電源は、USBと電池のどちらかをスイッチで選択できるようにした。
仕様

マニュアル
動作状況
回路図
部品配置
このページの最初に移動
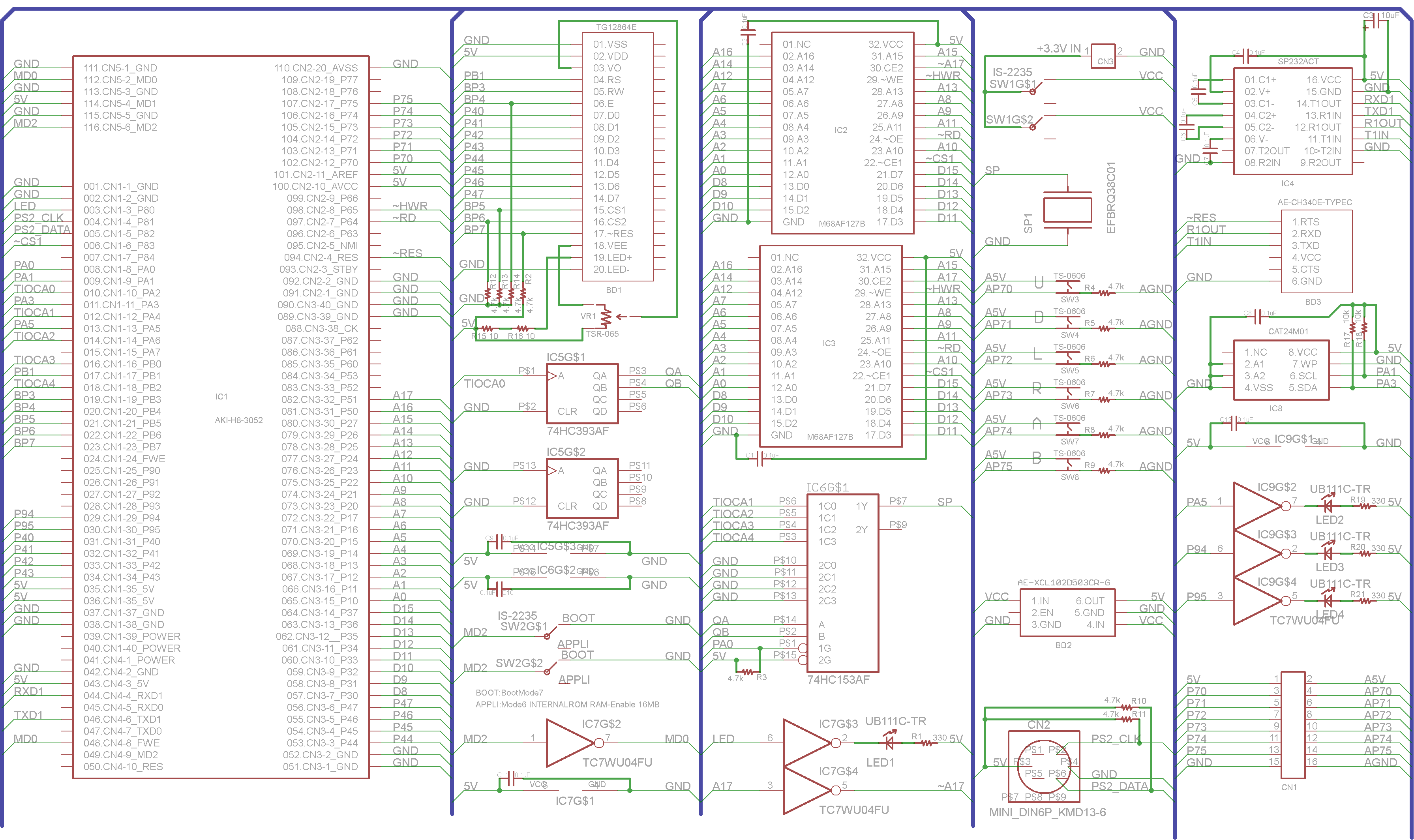
AKI-H8/3052F USB マザーボード Ver2.2
ほとんどの部品は、秋月で入手可能。電源は電池。PS2キーボードを接続可能。
仕様
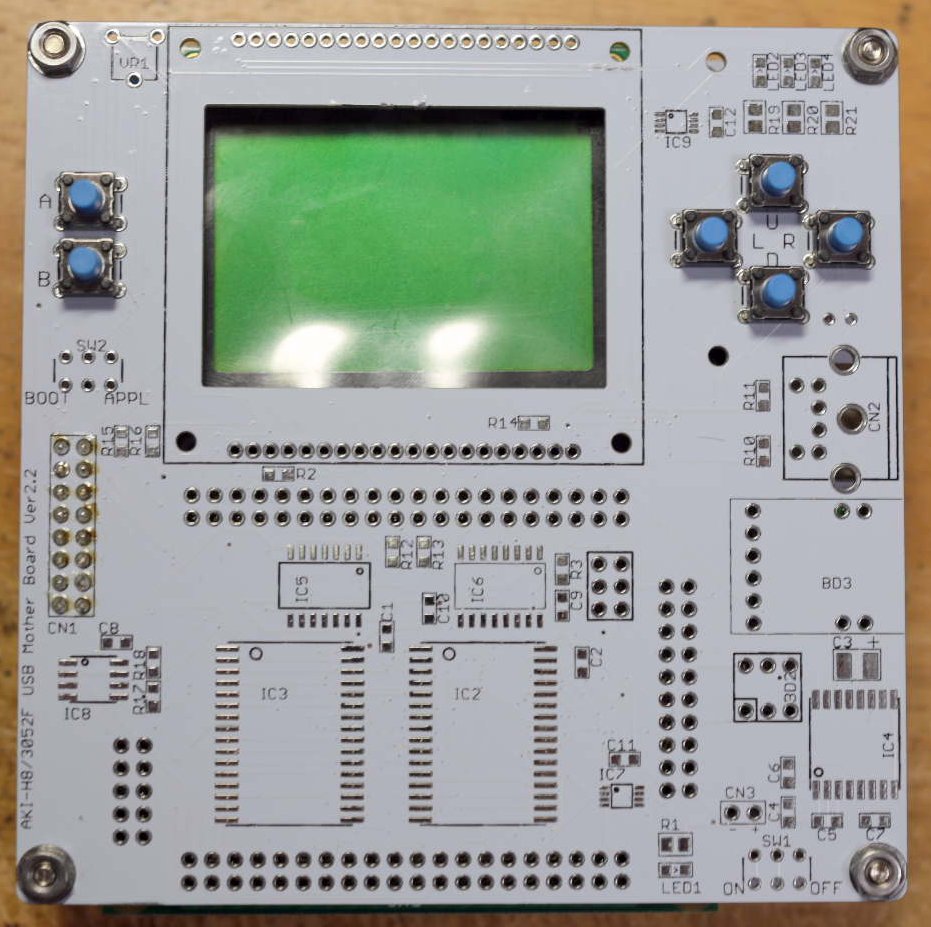
回路図
部品配置
メモリーマップ
このページの最初に移動
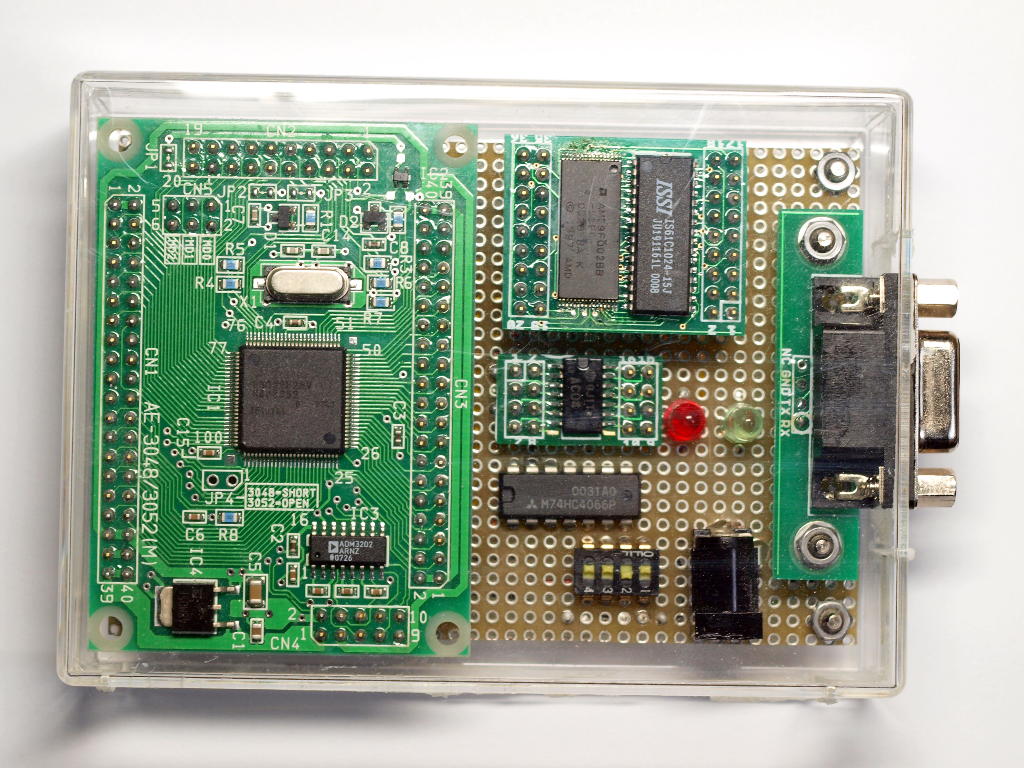
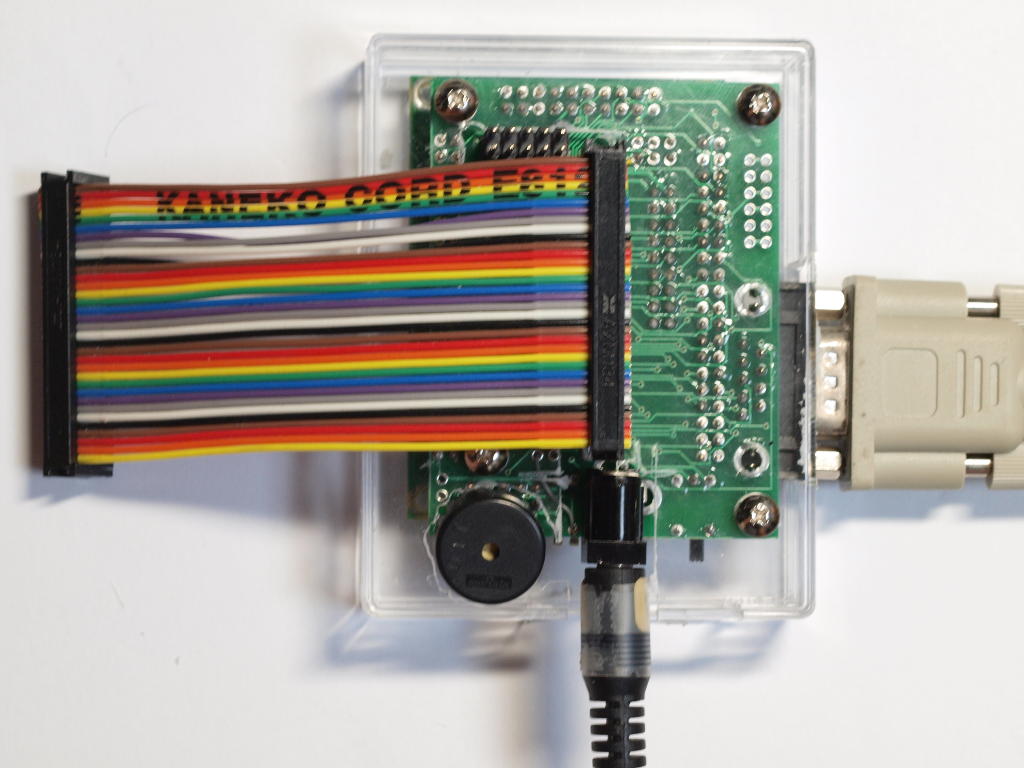
AKI_H8/3052F マザーボード
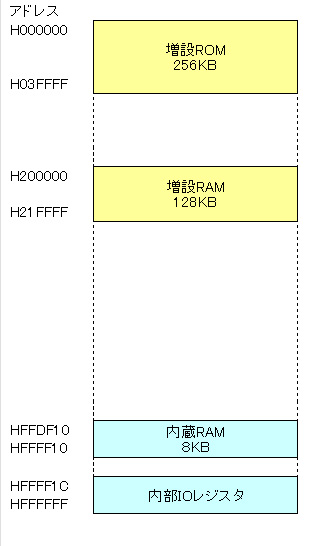
H8の内蔵ROMは書き込める回数が100回と少ないので、増設したROMにプログラムを書き込む設計にした。
内蔵ROMには増設ROMにプログラムを書き込むためのモニタプログラムを書き込む。
DIPスイッチで内蔵ROMのモニタプログラムを起動するか、増設ROMに書き込んだプログラムを起動するかを選択する。
増設ROMは10万回書き換えができるので、安心してプログラムを書き込める。
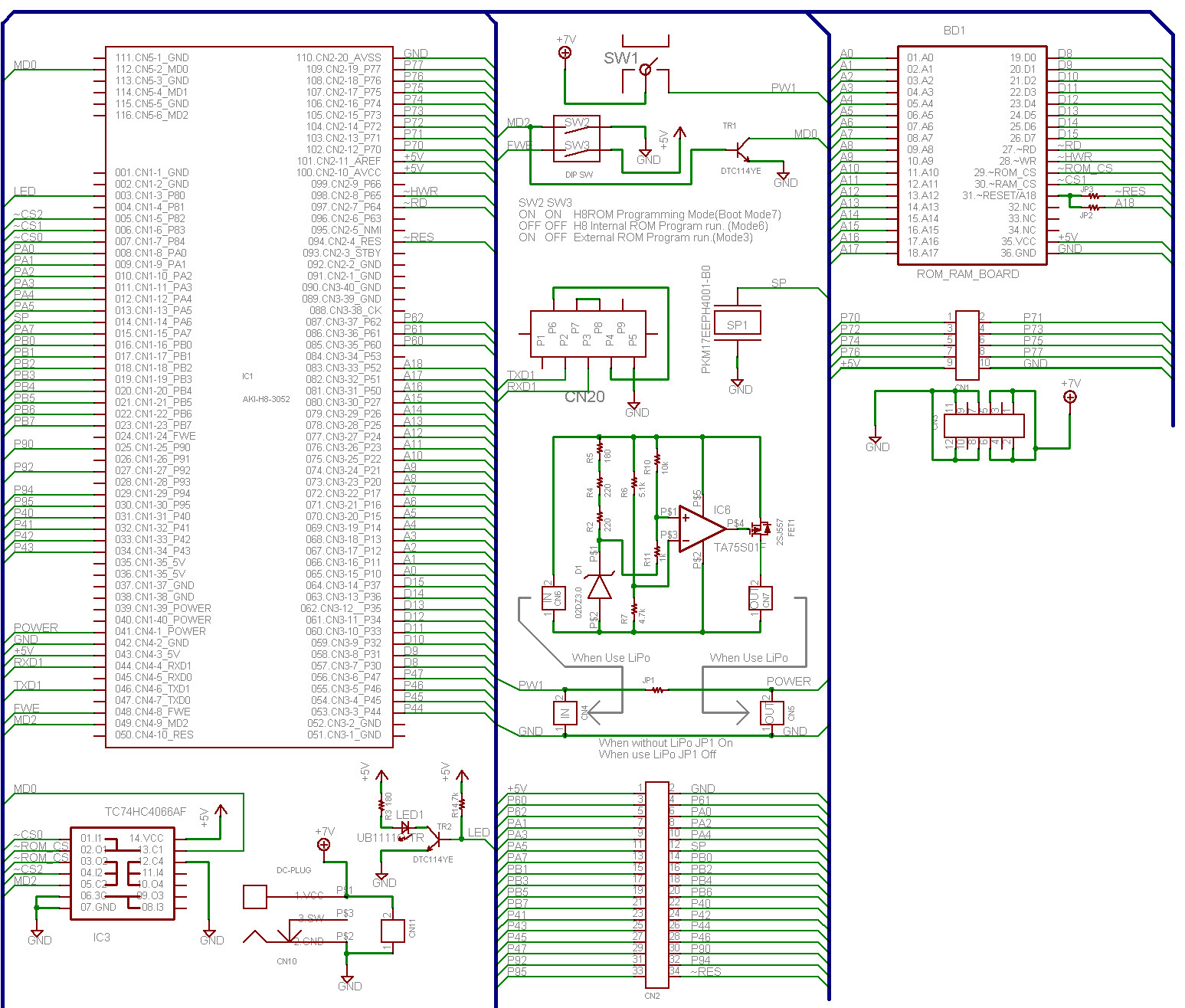
回路図
SW2 SW3
ON ON H8の内蔵ROMにモニタプログラムを書き込む
OFF OFF モニタプログラムを起動する
ON OFF 増設ROMに書き込んだプログラムを起動する
OFF ON 設定禁止
※全体の回路図のROM・RAMボード(BD1)のコネクタのピン番号は、CN1とCN2を通し番号で番号付けしたもの。
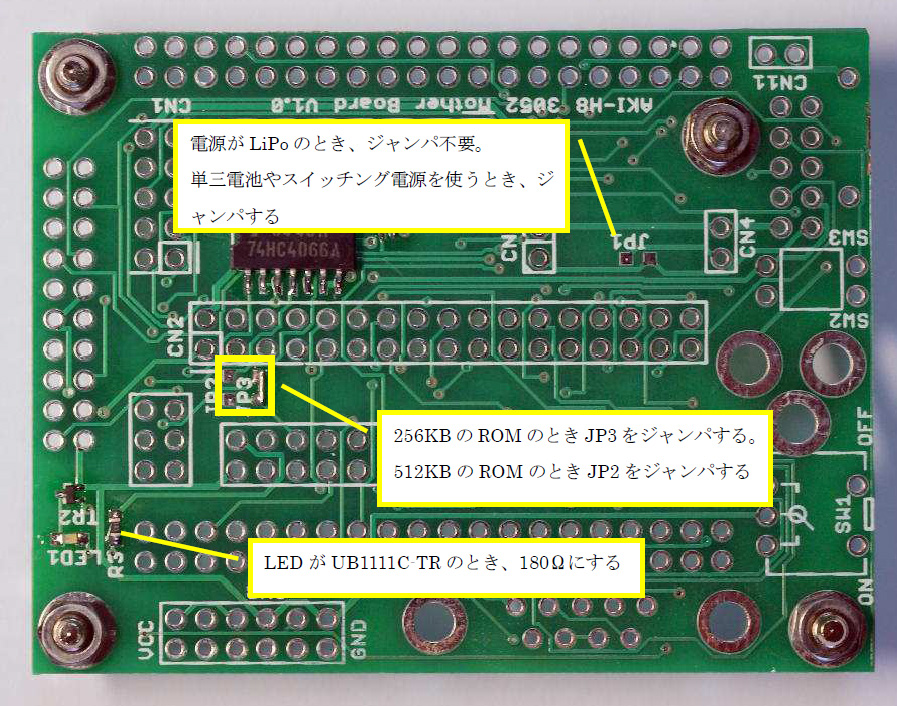
【全体】

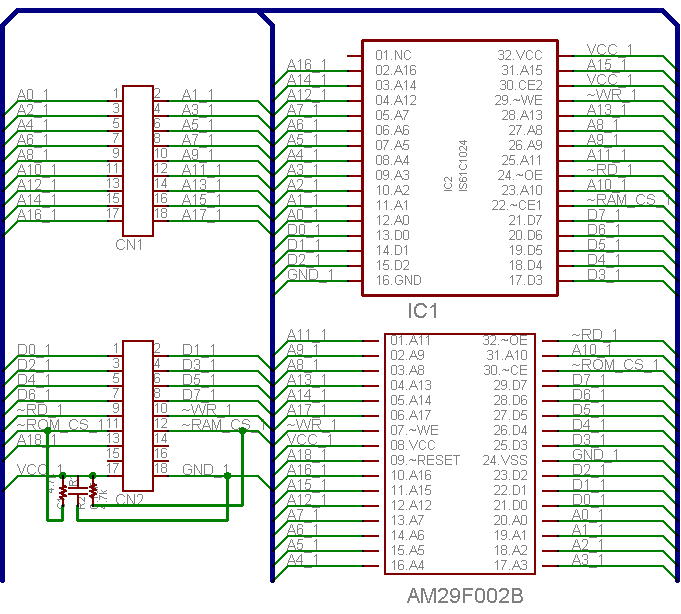 ROM・RAMボード(BD1)の部品配置
ROM・RAMボード(BD1)の部品配置モニタプログラム
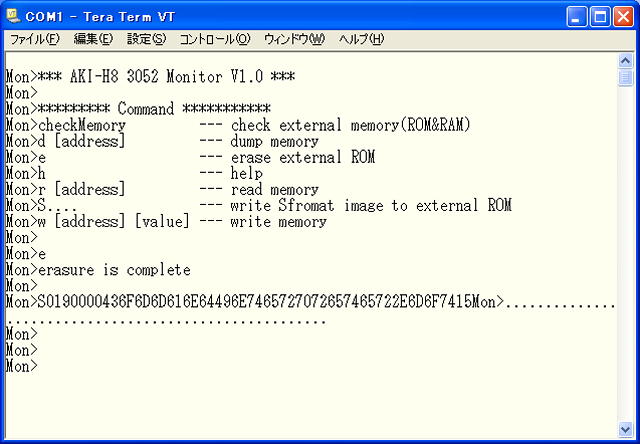
【プログラムを増設ROMにロードする方法】
モニタプログラムを起動した状態で、TeraTermの画面にeと入力しリターンする。(増設ROMを消去します。5秒くらいかかる)
TeraTermの[ファイル]メニューのファイル送信を使ってmot形式のプログラムを送信する。
モニタプログラム
モニタプログラムと類似のシリアルポートを使った通信プログラム(外部ROM書き込み動作確認用プログラム)
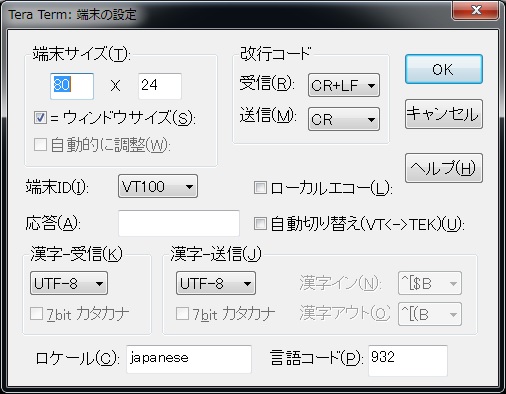
【TeraTermの設定】
【モニタプログラムの画面】
モニタプログラムを起動し、ROMを消去後に、プログラムをROMに書き込んだときの画面。
増設後のメモリーマップ
開発環境マニュアル
実験用マザーボード
回路図
部品配置
このページの最初に移動
RS232Cレベル変換モジュール(SP3222ECY使用)
回路図
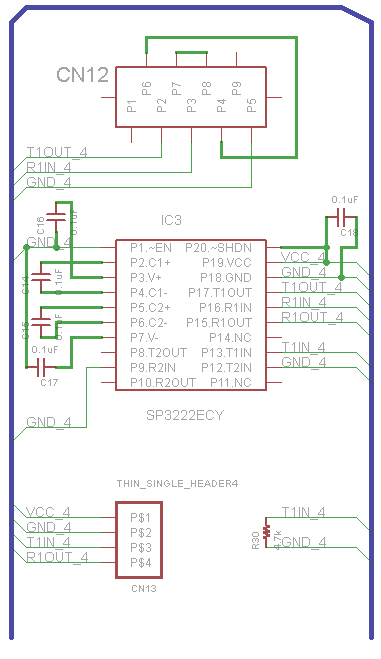
部品配置
このページの最初に移動
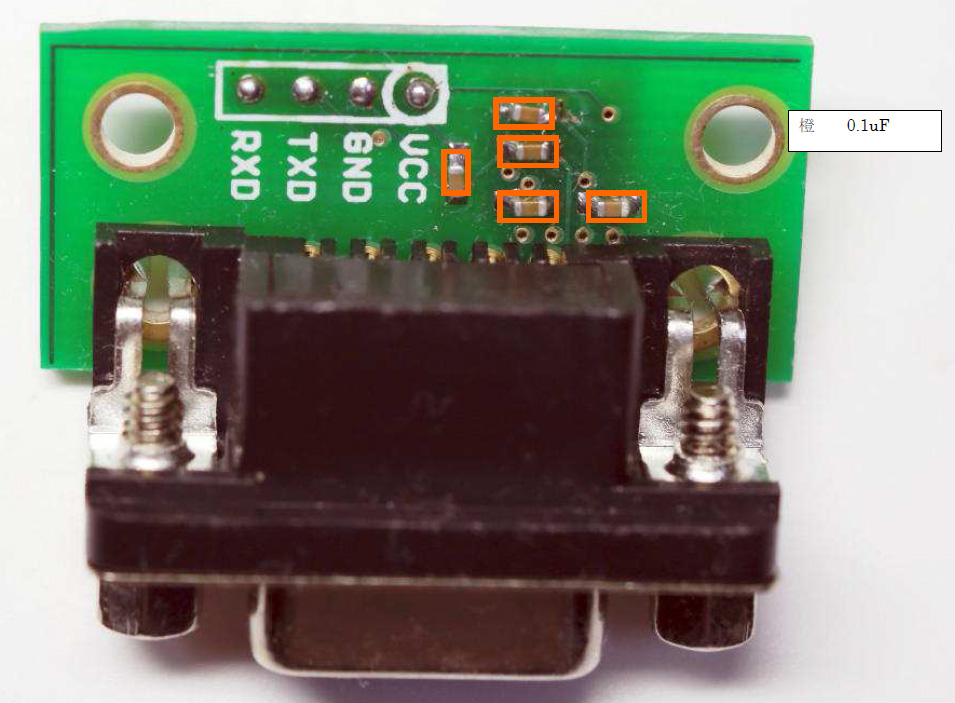
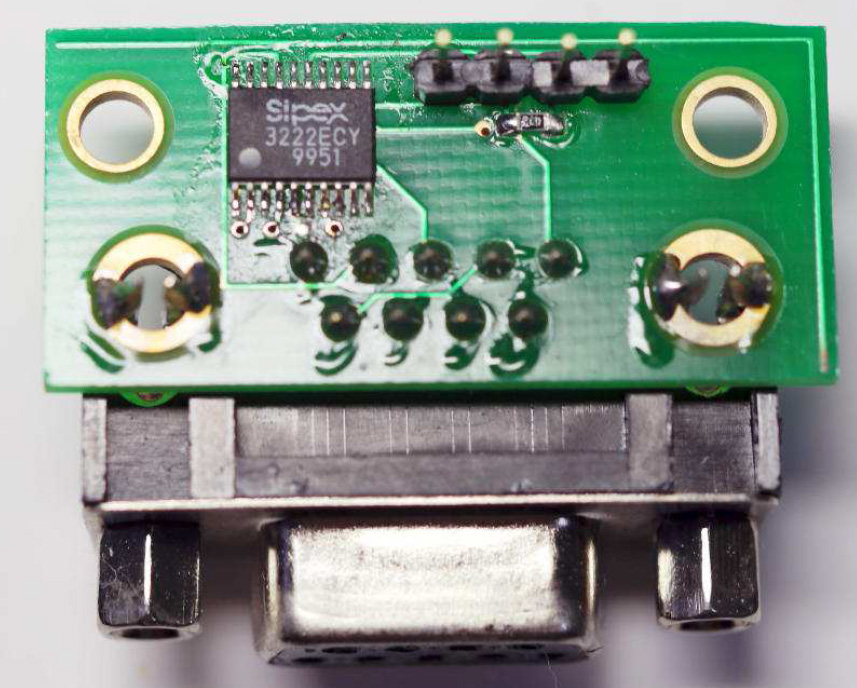
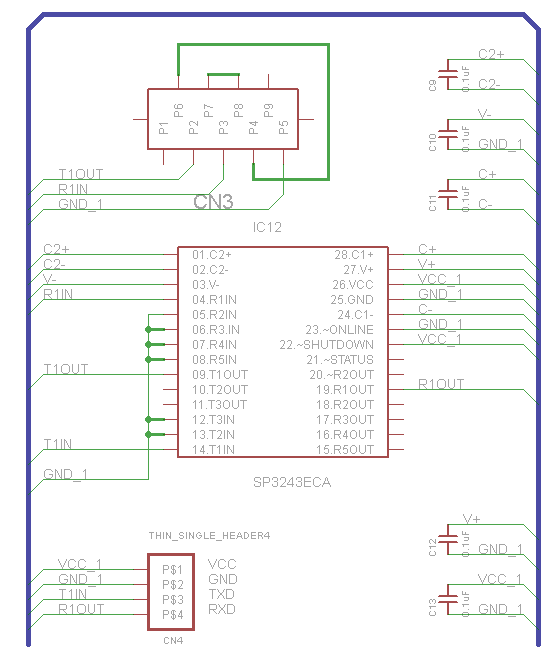
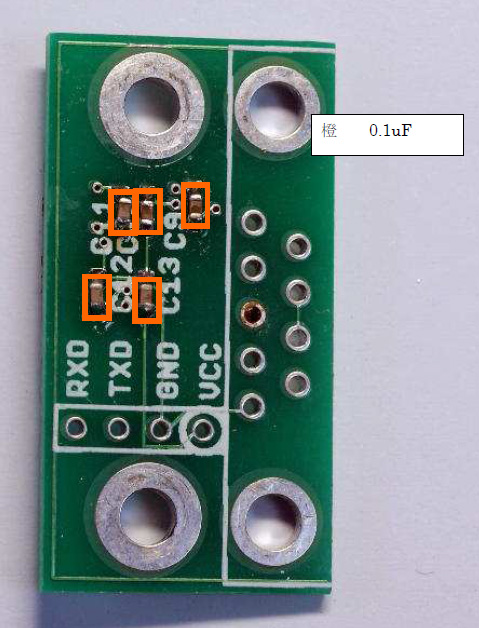
RS232Cレベル変換モジュール(SP3243ECA使用)
回路図
部品配置
このページの最初に移動
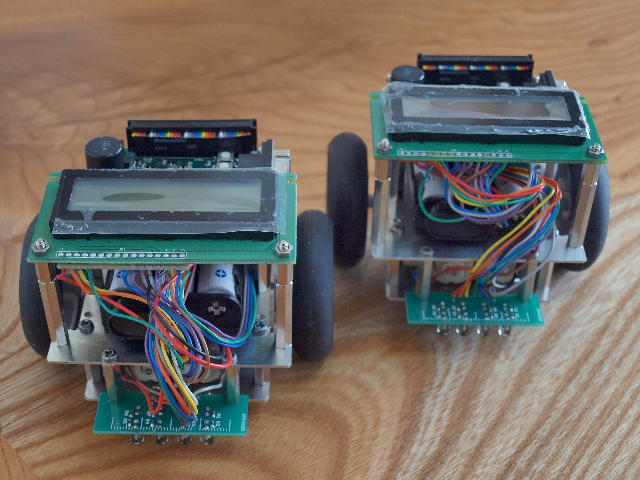
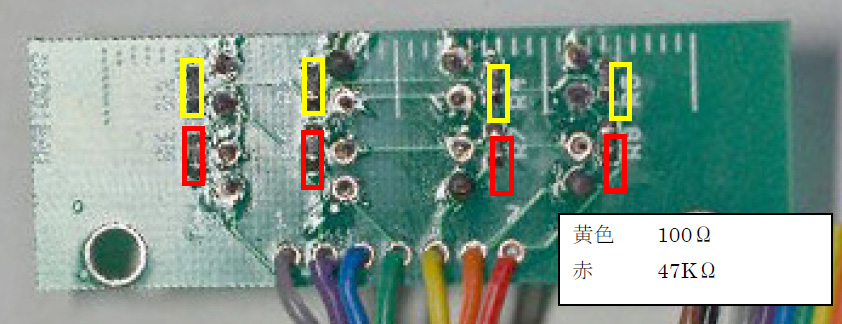
EE_Type_LTを利用したライントレーサ
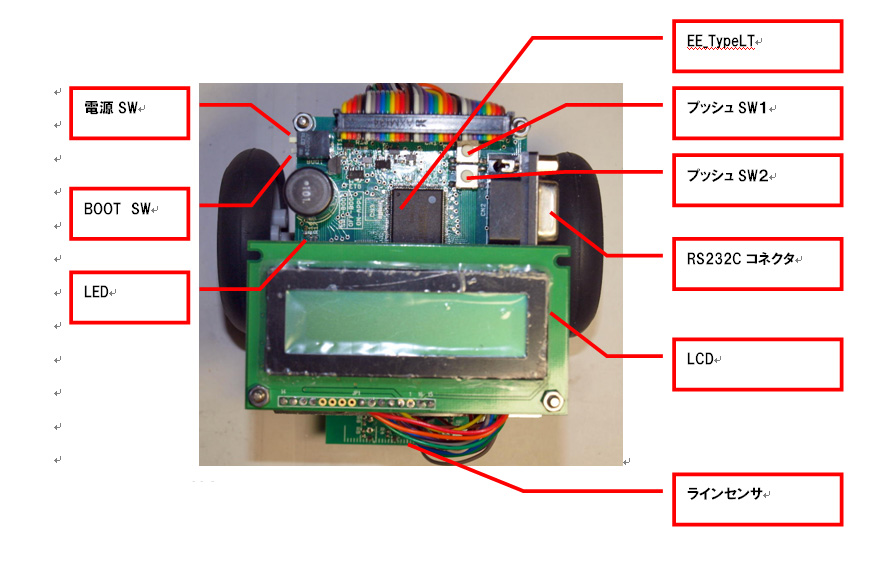
部品配置

このページの最初に移動
16×16ドットマトリックスLED
このページの最初に移動